

微信扫码即刻访问“巡星客”——国内领先的天文社区
安装好后打开(安装过程略),出现以下界面。


这是 PHD2 最常用的功能,下面将一一讲解。
一、设备连接设置

该功能将连接你的设备(含导星相机,赤道仪,AO)。按住 Shift 键点击该图标,将连接系统保存的,上次使用的设备。
点击该图标后,显示以下界面:
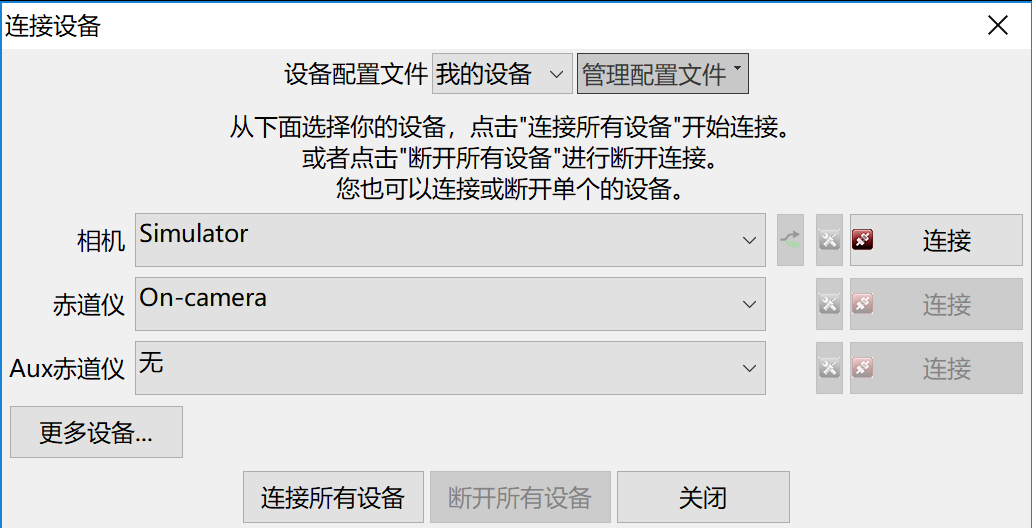
* 相机
可以根据自己的设备类型来选择合适的驱动。
可以选择直连驱动如:QHY5-II/QHY5L-II/ZWO ASI Camera 等。
也可以选择”ASCOM Camera Chooser”, 选择对应的导星相机ASCOM 驱动。
如果已经安装了导星相机(如:QHY5L-II)的 ASCOM 驱动,那么在此列表中会出现”CMOS QHY5LII Camera(ASCOM)”的选项。效果等同于 2。
注:此处 Simulator 为虚拟相机,仅供测试软件功能,正常使用时请勿选取。
* 赤道仪
根据赤道仪的不同,以及连接方法的不同,需要选择合适的设备。
如果导星相机带有 ST-4 接口,并且你的导星线已经正确的连接相机 ST-4 接口和赤道仪上的 ST-4(或者 Guide)口,那么,可以选择“On-camera”即可。
如果导星相机没有 ST-4 接口,或者你希望使用串口进行导星。那么,请在此处选择”ASCOM Telescope Chooser”,选择对应的赤道仪 ASCOM 驱动。
如果已经安装了赤道仪的 ASCOM 驱动(如:iOptron 赤道仪),那么在此列表中会出现”iOptron Telescope .NET ASCOM”字样(注:该名称会根据艾顿赤道仪 ascom 驱动的版本变化而变化,请仔细核对)
如果有多个软件需要共享连接赤道仪,必须选择 Generic Hub 或者 PothHub 方式,并且要在 Hub 设置中,正确的连接赤道仪。
* AO
自适应光学设备,通常我们无需使用,选择“None”即可。
全部正确选择后,可以分别点击右侧的“连接”按钮,或者点击下部的“连接所有设备”按钮进行设备的连接。
正常连接后,软件下部状态栏会有相应字样显示:

好了,设备连接完毕,现在可以开始找导星了。
二、导星
 ,点击此按钮,可以让导星相机开始工作。会出现类似以下界面:
,点击此按钮,可以让导星相机开始工作。会出现类似以下界面:
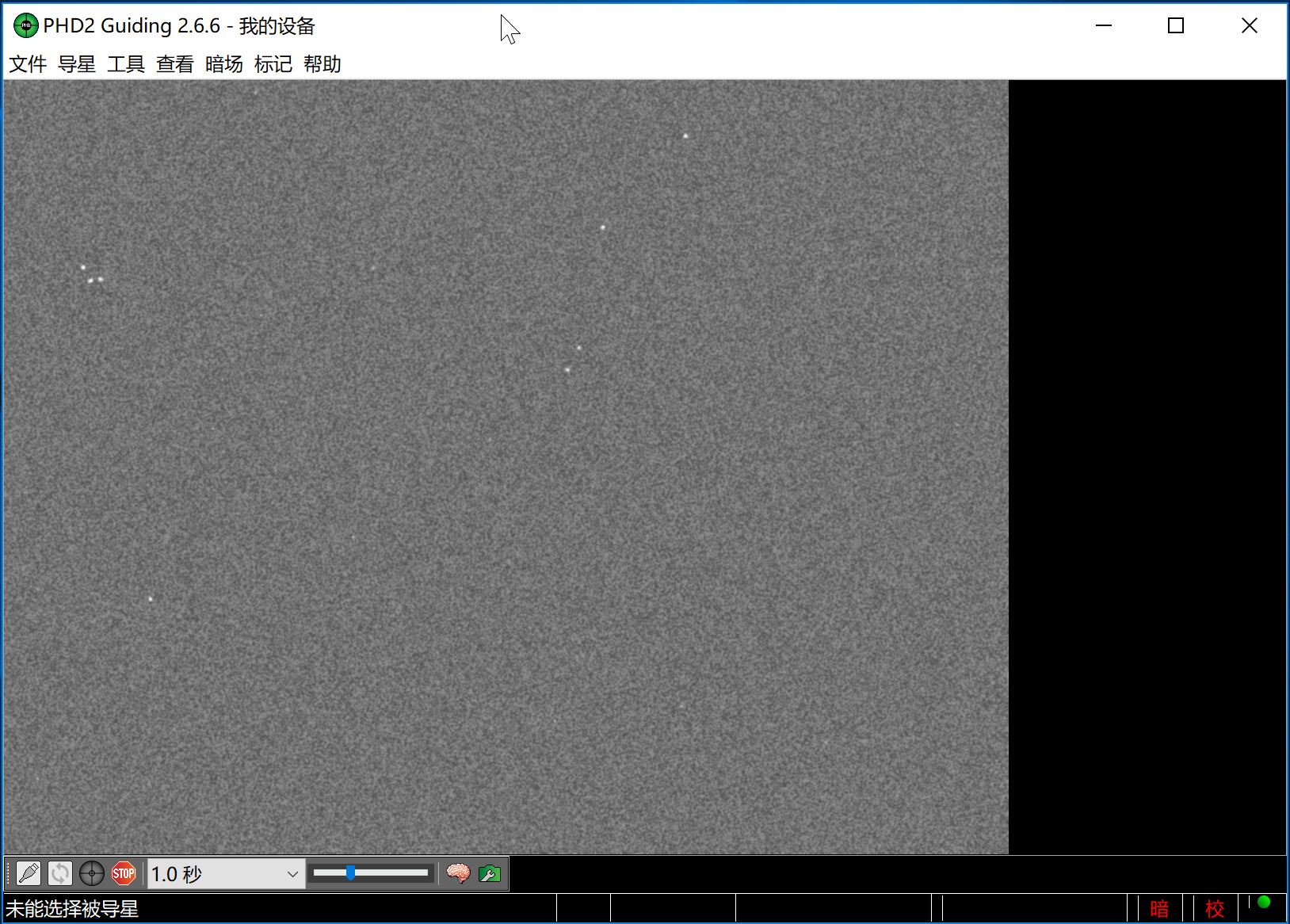
若导星镜未与导星相机合焦,可以在此处利用该界面完成。
若未能找到星点,可以尝试增加曝光时间。

若觉得背景噪点过多,可以调整灰度显示(越往右侧, 背景越黑) 。
若想停止该过程,可以停止。

若一切就绪,可以准备下一步了。
先在鼠标左键在界面上选择一个星点:
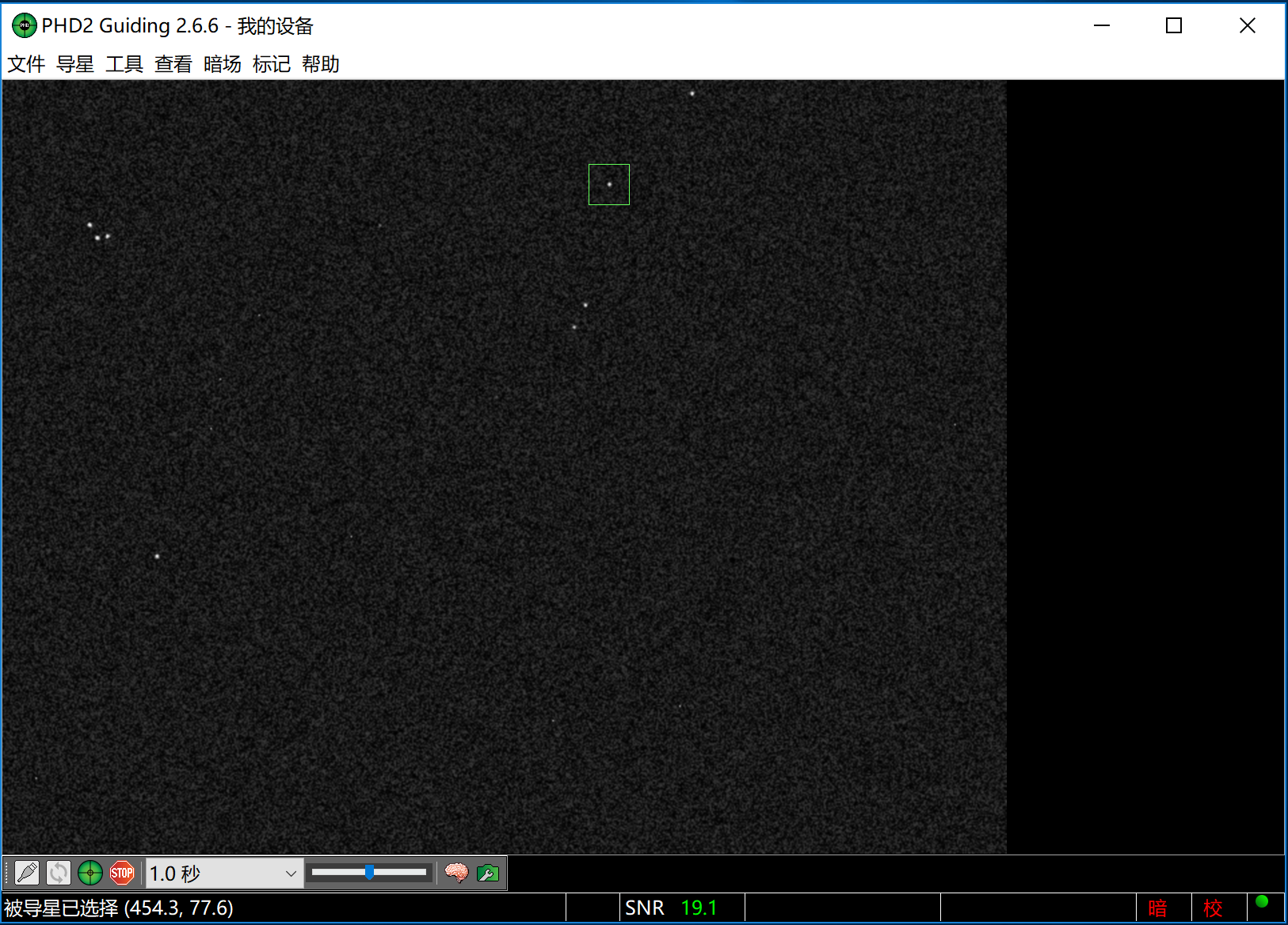
选中星点后, 图标将变亮,点击即可开始导星。
图标将变亮,点击即可开始导星。
若之前未校准过,PHD 将会自动开始校准(需要等待几分钟时间),按住shift键点击该图标可以强制校准。校准时会出现类似以下界面:
校准完毕后自动开始导星。若之前已校准,PHD 将会自动开始导星。将会出现以下类似界面:
开始导星后,可以在软件顶部菜单的“查看”中,选择“显示图形”,“显示星点图”,“显示散点图”,将出现以下类似界面:
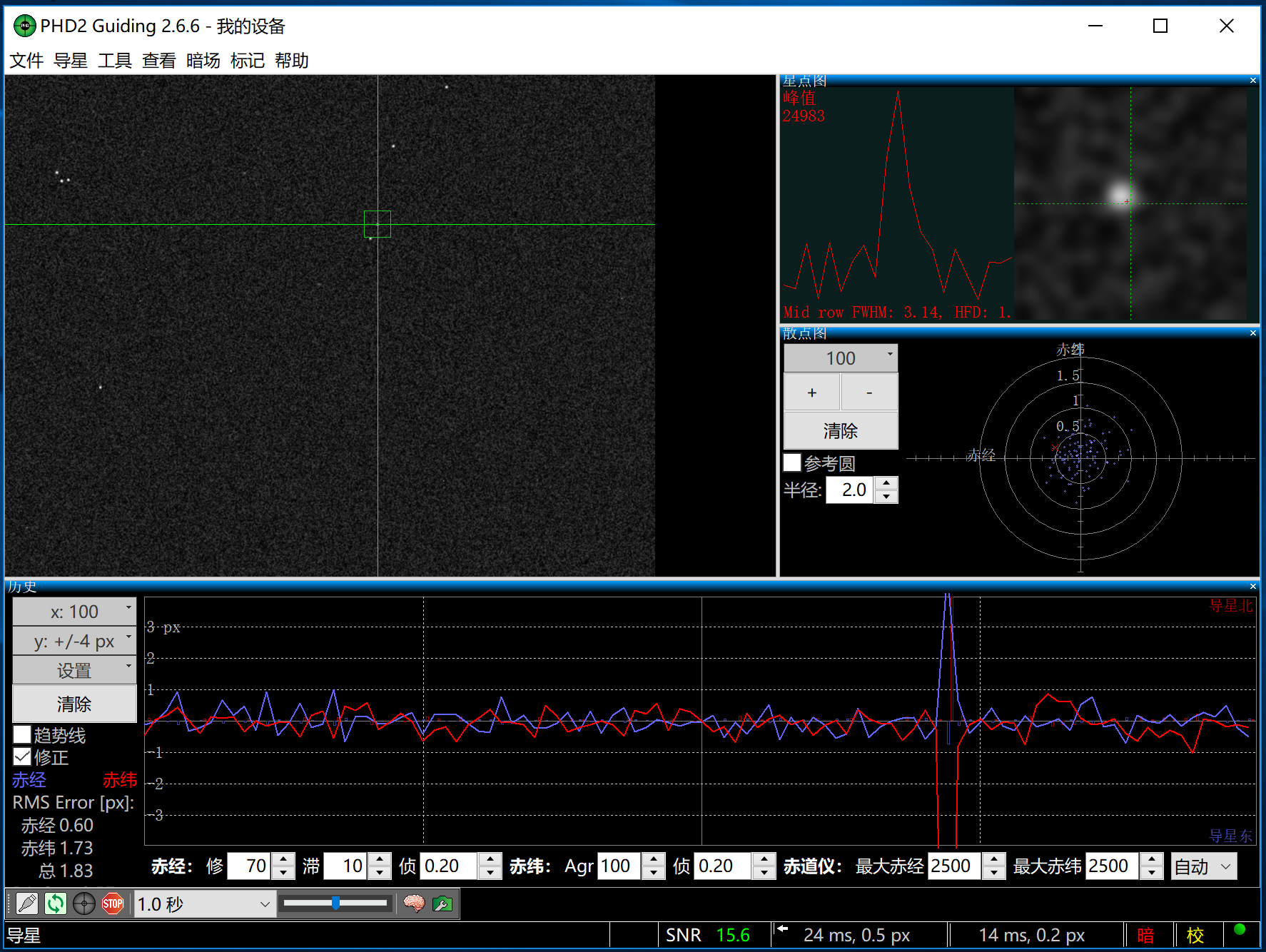
开始导星以后,我们希望看到的导星曲线如下所示:(此功能可以使用菜单中的“查看”->“显示图形”来打开)
有人会觉得显示的东西过多,看起来很凌乱,有点无从下手。下面,将详细解释:
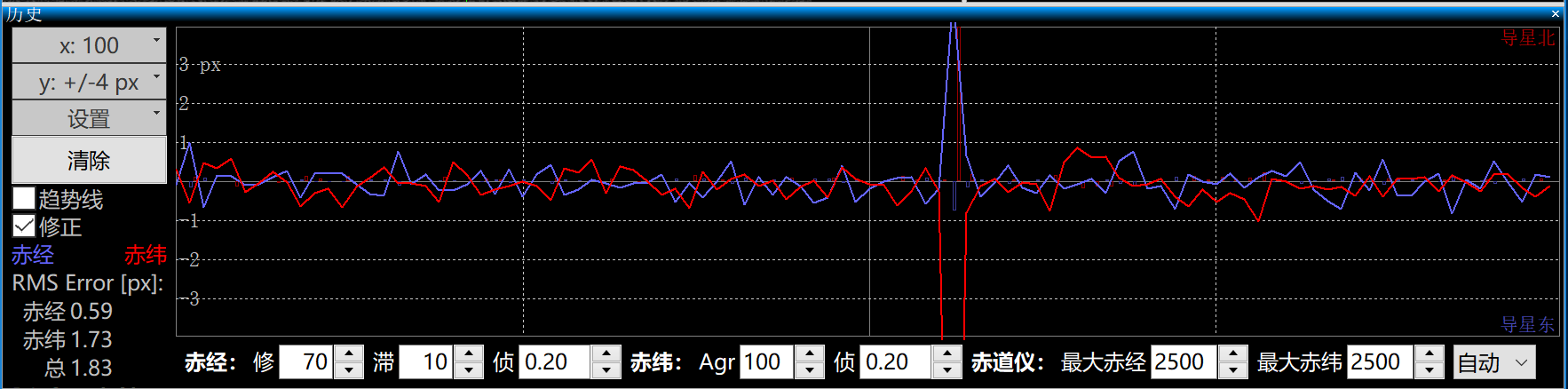
x:100 : 此处可以选择图形的历史周期, 默认为 100 , 可选为:
50/100/200/400,可以根据各人须要来选择。
y:+/-4:此处是图形中的 Y 坐标的范围值,默认为 4,可选为:1/2/4/8/16。
设置:此处可以选择坐标轴的内容,Y 轴坐标的类型(像素 或 角秒),以及曲线颜色等。默认情况下是无法选择 Y 轴坐标为角秒的,须要在高级参数中设置后才能选择。
清除:用来清除历史数据,让图形重新开始。
趋势线:用来显示图形数据的趋势线,仅供参考。(通常无需显示)
修正:用来显示发送给赤道仪的命令,仅供参考。可选显示。
RMS:用来显示导星误差的均方根值。
a. 通常来说,这个值应该越小越好。越小,表明越平滑,可以获得更好的导星效果。(注:该值有一定的下限,不能无限小,和使用的导星相机,导星镜的焦距,是否bin2x2 等有关)
b. 通常来说,在极轴准确的情况下,赤纬的 RMS 相比赤经来说要小一些。原因是赤纬本身只是辅助修正,主要的修正在赤经上。若发现赤纬波动较大,应首先考虑极轴是否精准。
c. 若设置了正确的导星相机参数以及导星镜焦距,将会同时显示角秒数据, 导星曲线是良好,应该以角秒数据来对比。
RA OSC:用来显示赤经导星曲线振荡。正常应该在 0.16~0.59 之间。
赤经:
a. 修:修正强度,默认为 100%。若发现曲线过于波动,可以考虑减少该值。比如 50%
b. 滞:导星数据参与计算度,默认为 10%。即之前导星数据的 10%将参与本次导星计算。该值适当调增/调减,可有利于平滑曲线。但须要结合a)一起使用,勿暴力使用。
c. 侦测:侦测星点移动的像素,默认为 0.20 像素。若曲线波动过大,可以适当调低该数值。
赤纬
a. Min Mo: 侦测星点移动的像素,默认为 0.20 像素。若曲线波动过大, 可以适当调低该数值。
赤道仪
a. Max RA:赤经最大导星脉冲时间,默认为 1000 毫秒。通常可以无需改动。
b. Max DEC:赤纬最大导星脉冲时间,默认为 1000 毫秒。因赤纬只是辅助导星,通常波动较小,在视宁度较差时,可以适当调低(如 50~200ms), 降低赤纬波动。(此处需慎重,可能有反效果)
赤纬导星算法,默认为自动,可以选择“无”,“北向”,“南向”算法。通常使用自动即可。使用单轴可导星的赤道仪时,此处应选成“无”。
星点图
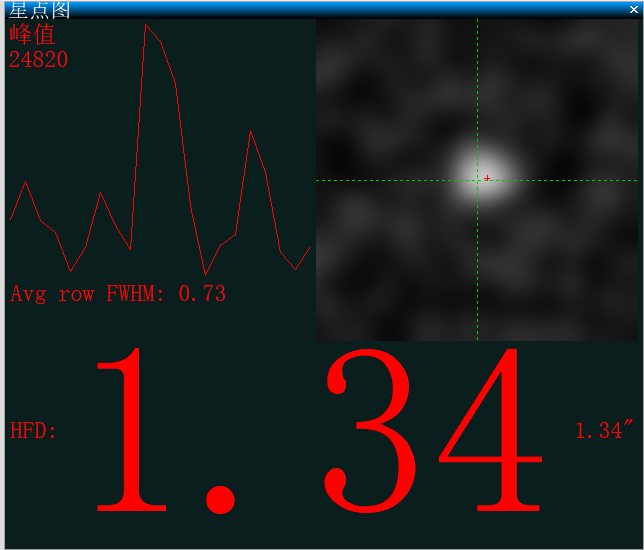
显示星点的半波宽,是否移动等,仅供参考。
散点图

显示导星数据的波动情况,点越聚拢,通常效果就越好。
注意:默认单位为像素,须要转换为角秒值(须要在高级设置中配置),才有和别人相比的意义。