

微信扫码即刻访问“巡星客”——国内领先的天文社区
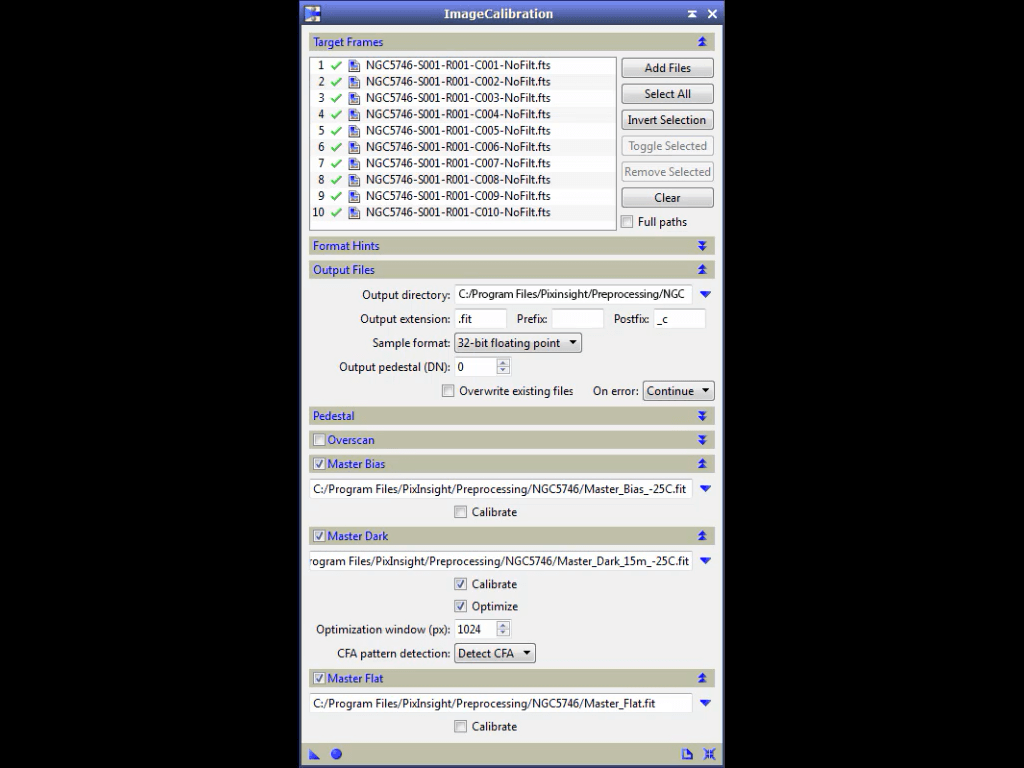
有了主偏置,主暗场和主平场后,我们再来看Image Calibration进程。我们已经用它来校准过平场了。现在,我们要用它来校准亮场。
这当然可以用来替代Batch Preprocessing脚本, 并且是从头开始。先加载原始的、没有校准过的彩色图像作为我们的目标图像。
我们再次指定校准后文件的输出文件夹。
找到我们的主偏置和主暗场。
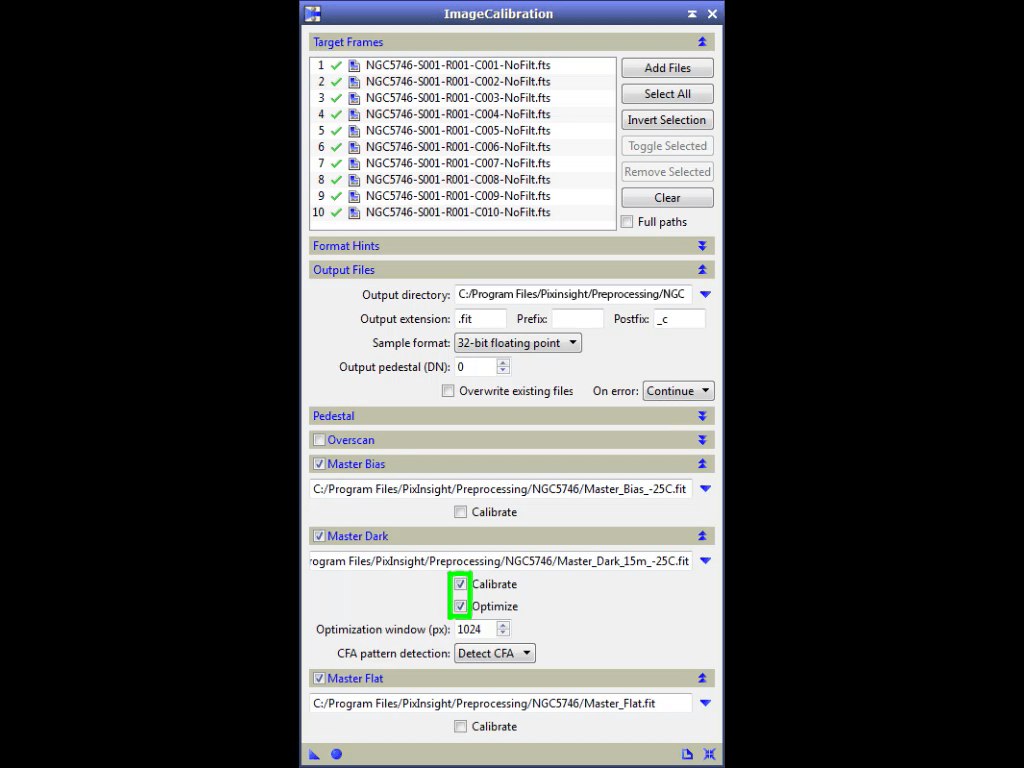
和以前一样,把Calibrate和Optimize都选上。
这次我们增加了一个主平场。
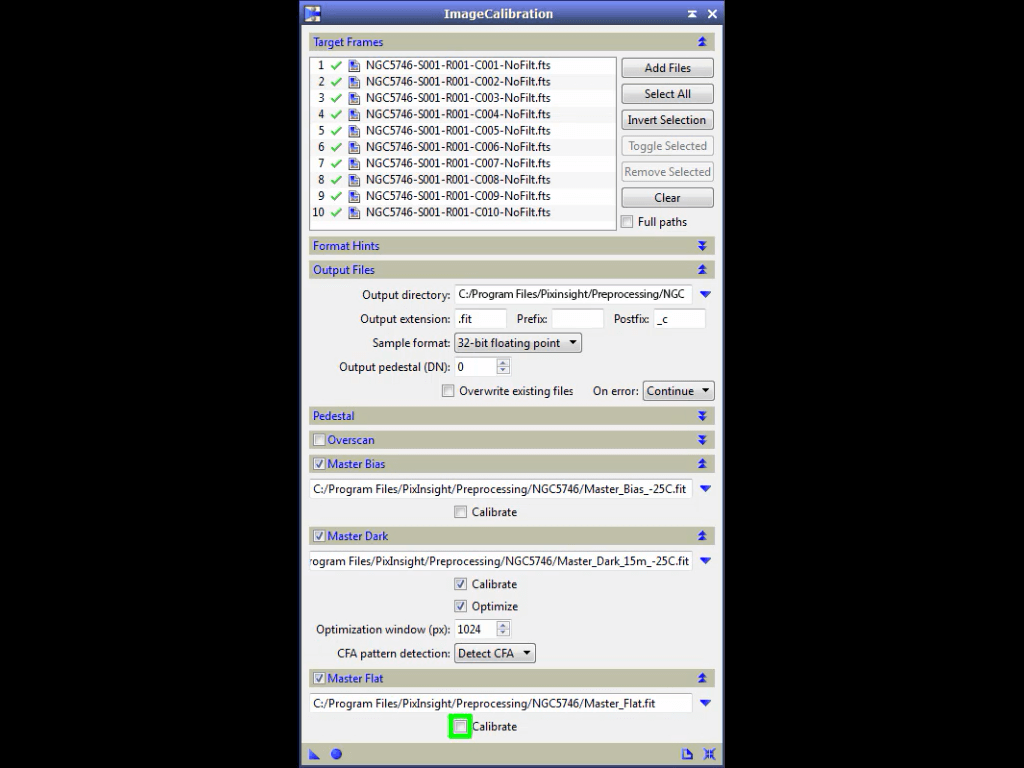
由于之前已经校准过平场,所以这个Calibrate就不要勾选了。
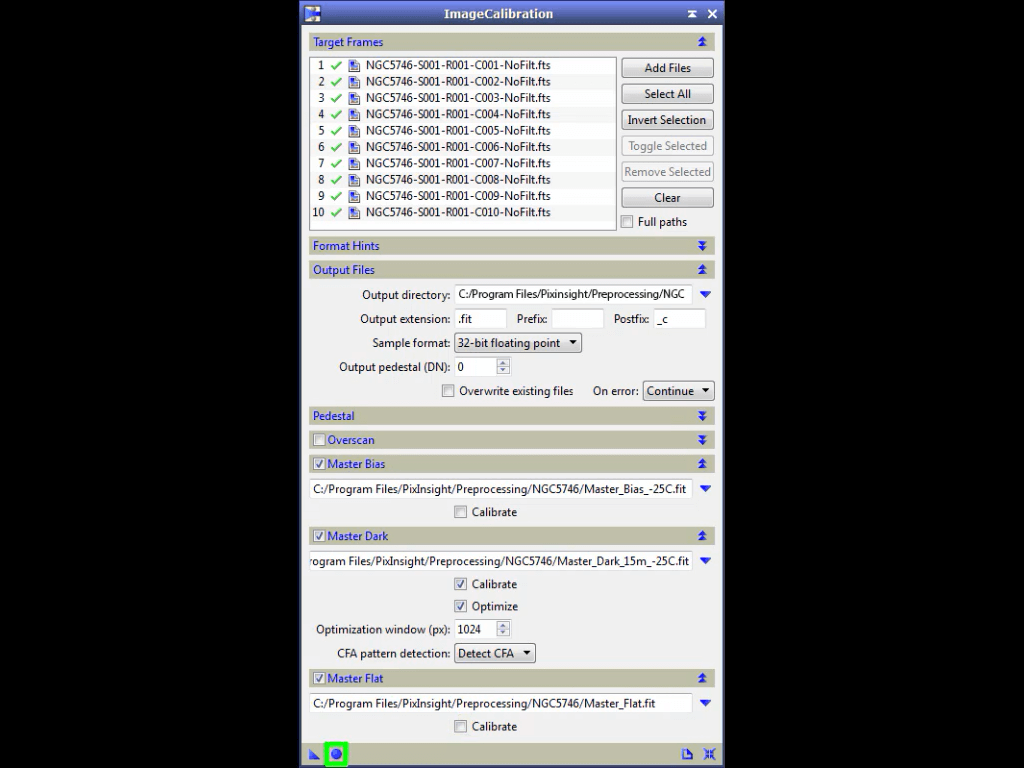
点击Apply Global (运用全局),校准过的亮场就会被写入到指定的文件夹里。
如果是校准单色文件,一般情况下,主偏执和主暗场需要和亮场的像素合并模式(bin mode)一致。
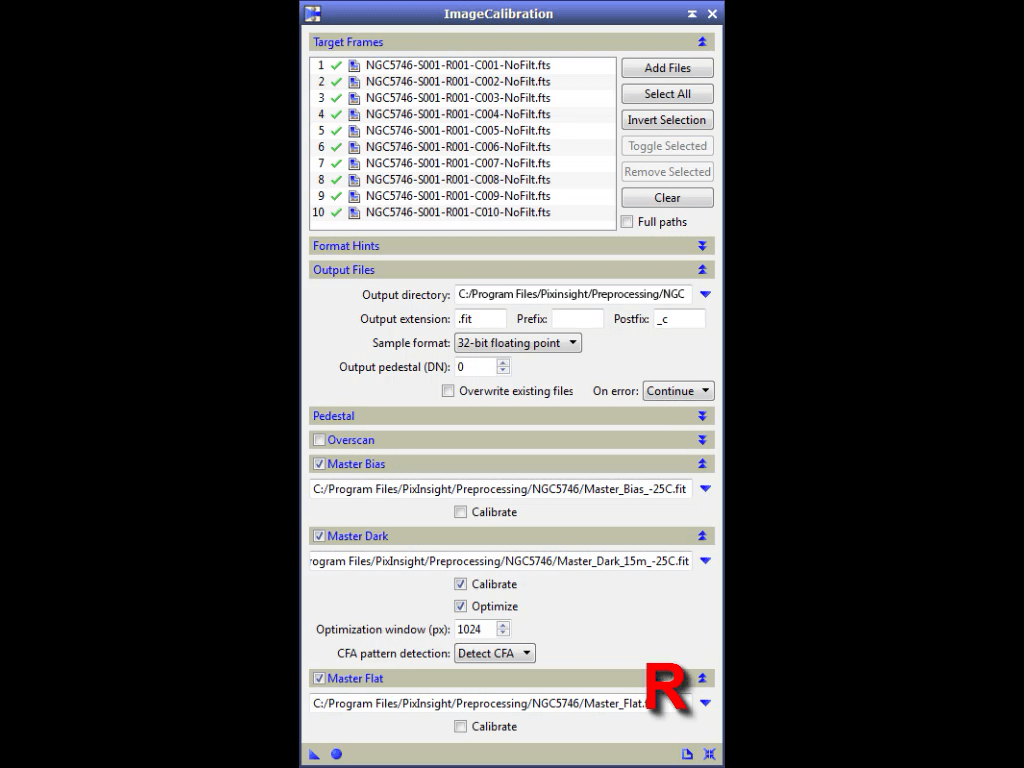
但是使用主平场的时候,每一个滤镜通道都需要分别校准。L通道对应L通道的平场,R通道对应R通道的平场等等。
校准完毕之后,处理过的文件要用Star Alignment进程对齐。
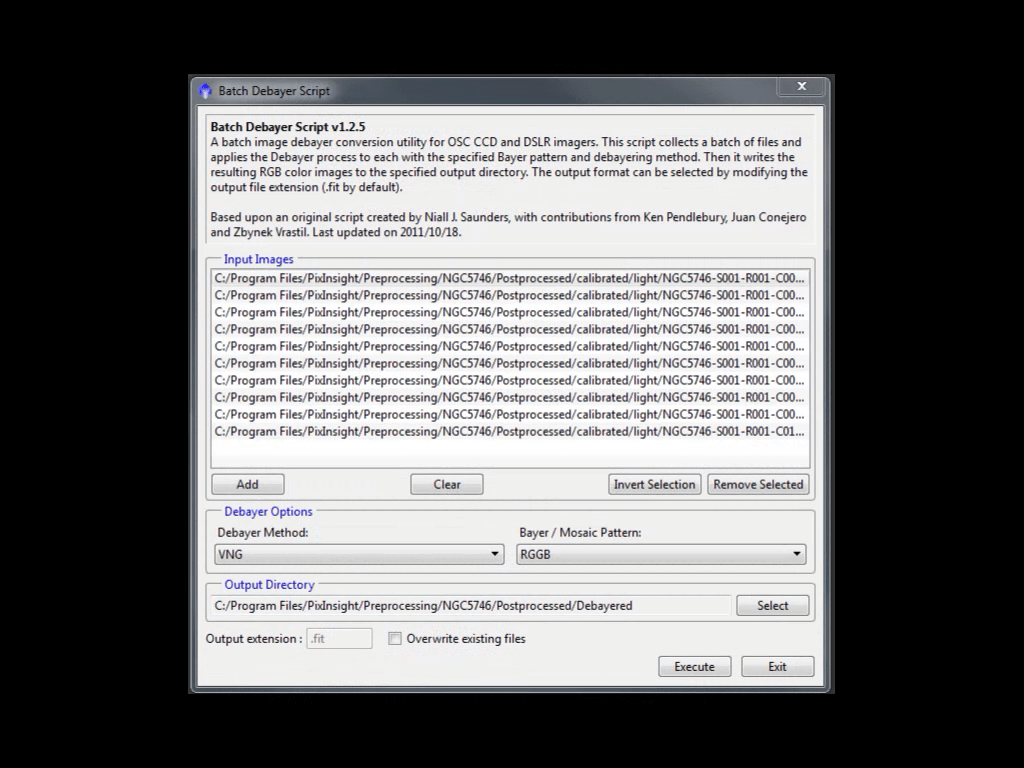
由于这个是彩色相机图像,校准后的图像在对齐前需要用Batch Debayer脚本转色。Batch Debayer脚本用起来很简单。添加校准过的彩色相机图像,选择VNG和你之前了解到的像素排列模式,选择输出文件夹,点击执行(Execute)。
和校准过的单色图像一样,彩色相机文件现在可以用Star Alignment对齐了。
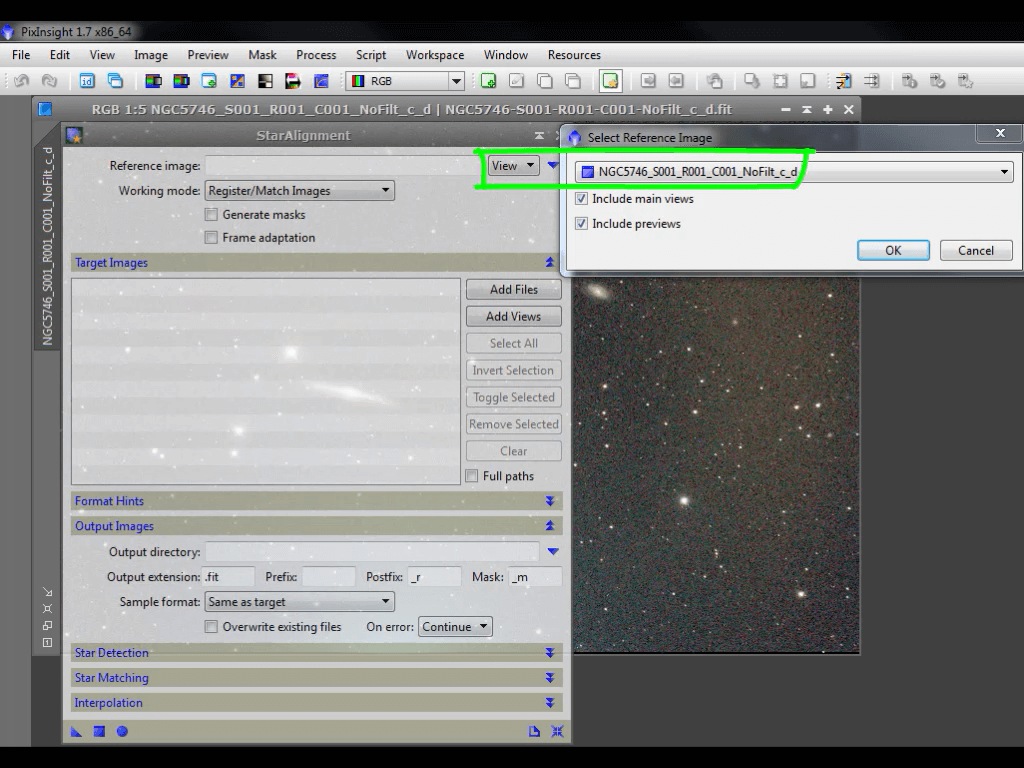
Star Alignment也很简单。对于基准图像(Reference image),你可以选择 View 选择一个打开的图像,
也可以选择File 从硬盘中选一个文件。
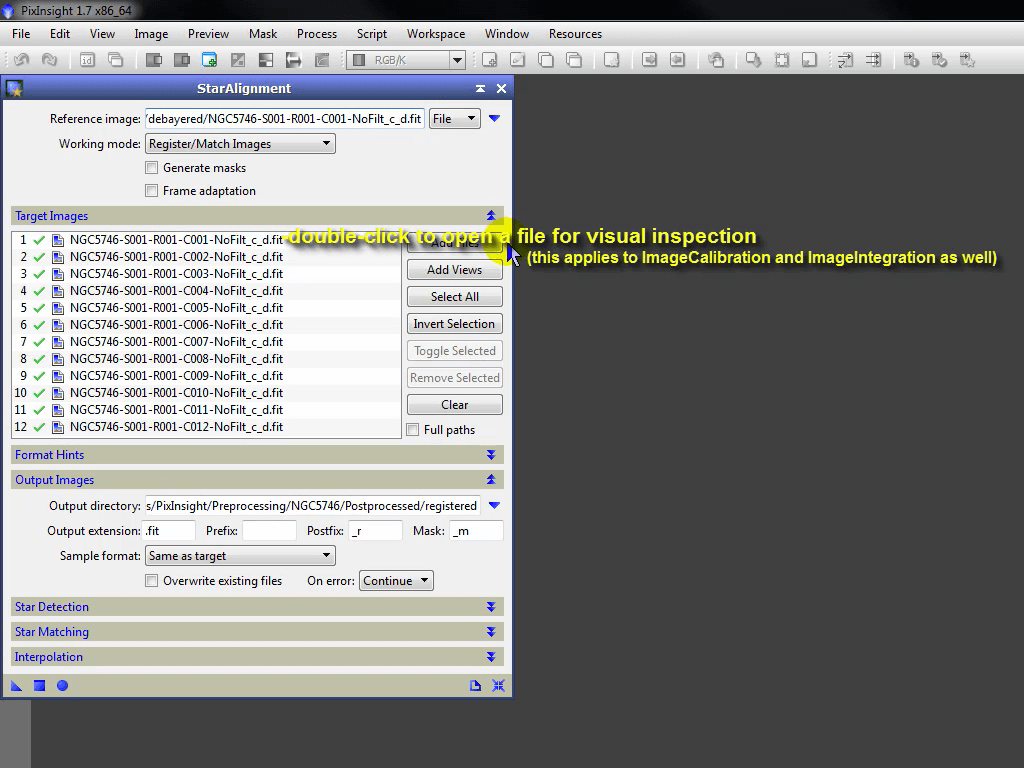
(画面文字:双击可以打开文件目视检查)如果图像之间漂移了很多个像素,或者要对齐几组不同构图的图像,要小心选择,因为所有的图像都会基于基准图像(reference image)对齐。
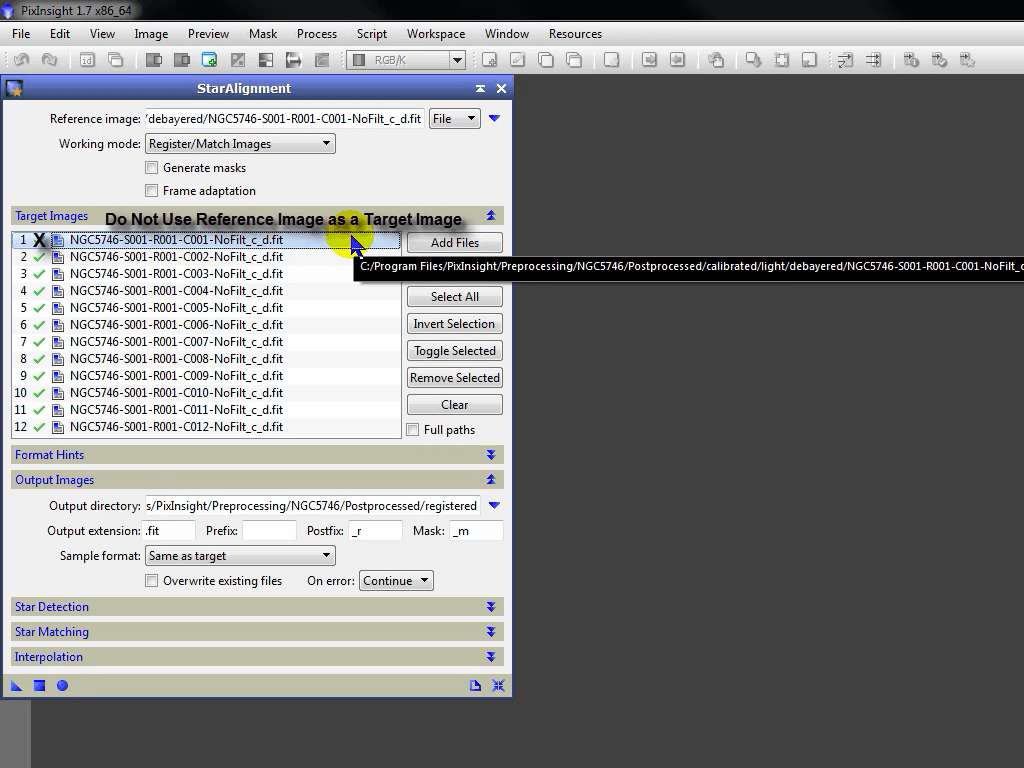
接下来,加载我们校准过、转色过的彩色相机图像来对齐。不用包含基准图像(reference image)。

输出文件夹你已经很熟啦。我们发现默认的Star Detection和Star Matching参数都很好,你应该很少需要改变它们。
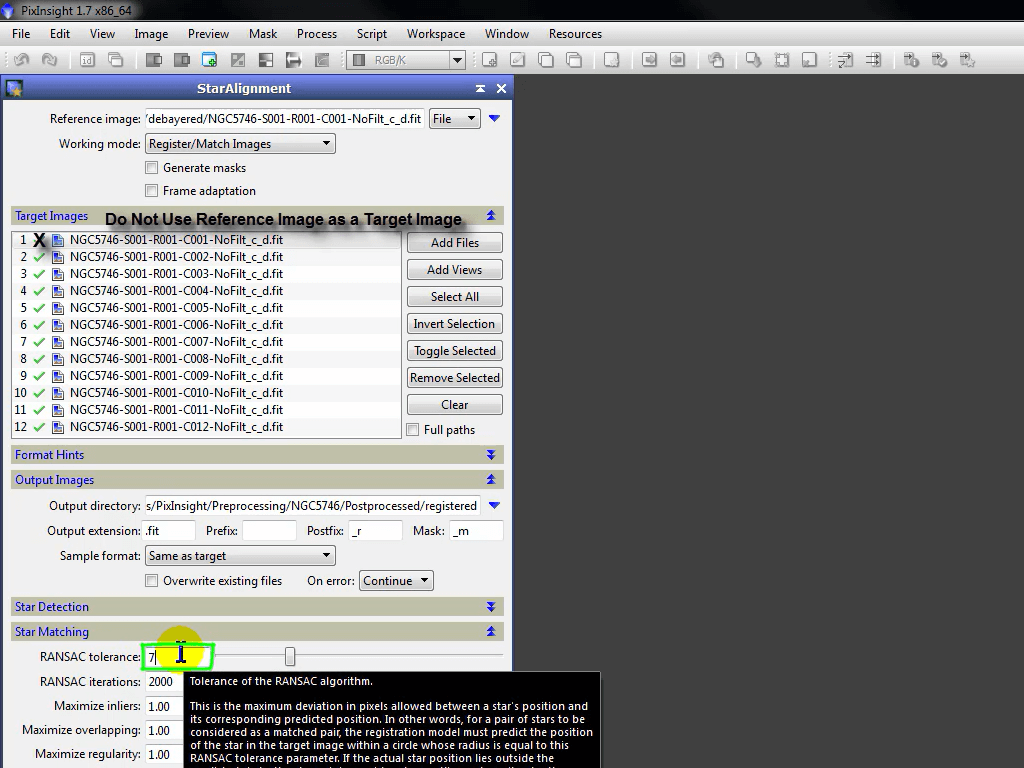
极端情况下,可以把RANSAC tolerance增加到6 甚至 8。
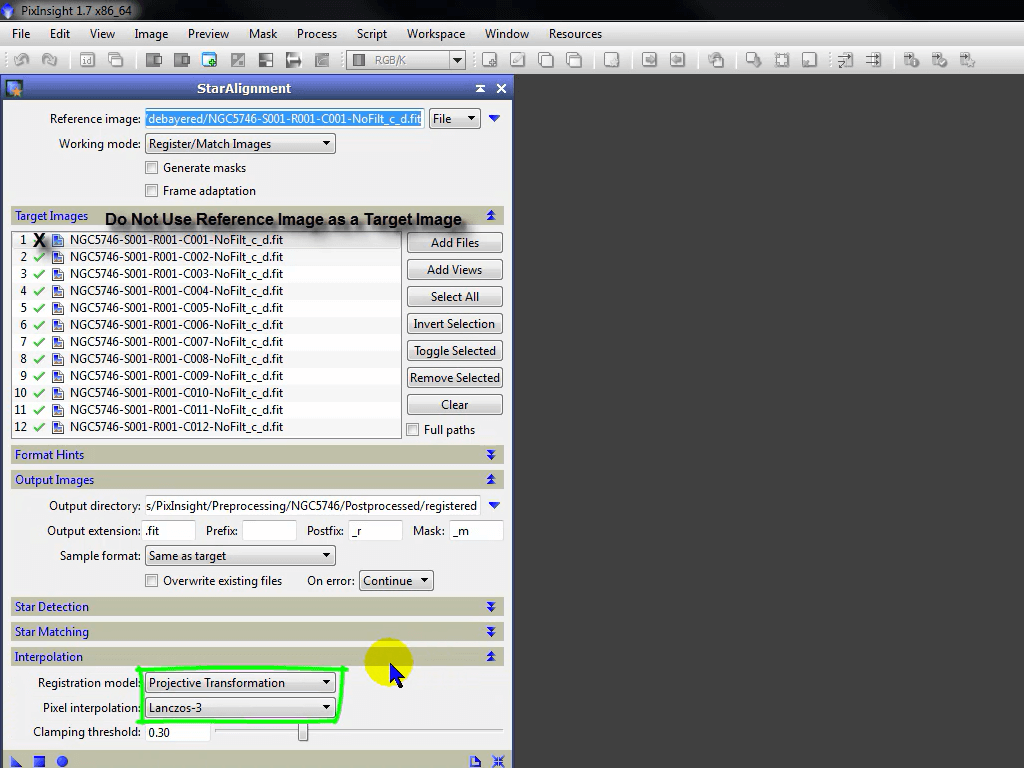
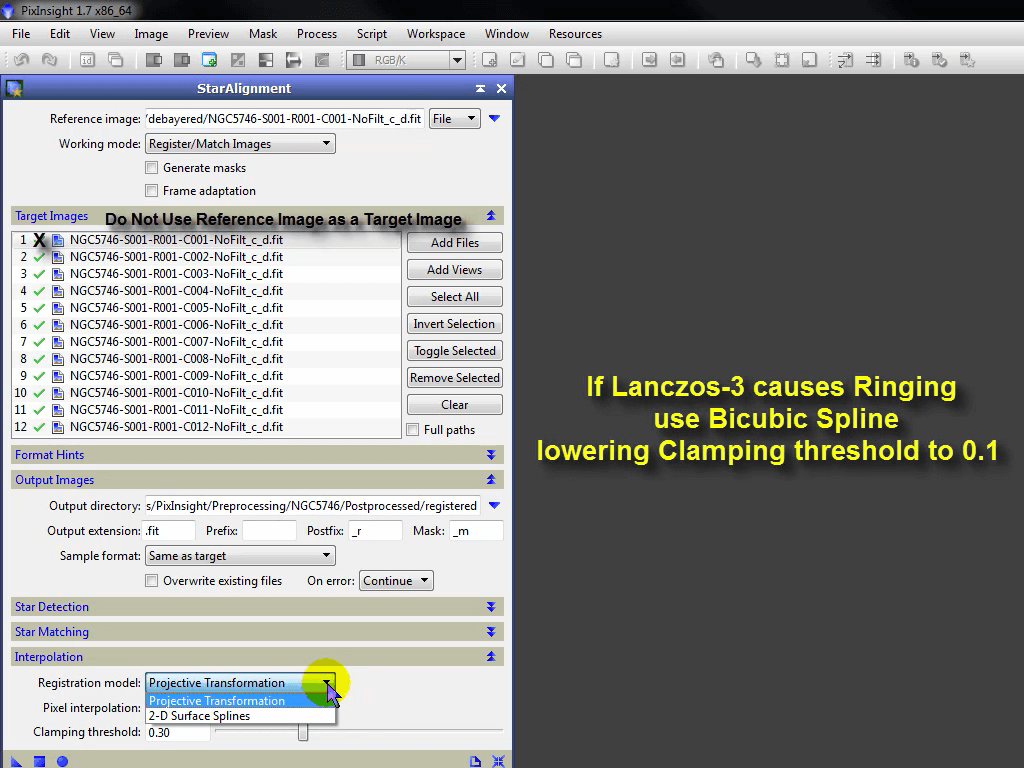
我们推荐Projective Transformation 作为对齐模型(registration model),用我们的老朋友Lanczos-3作为插值算法(Interpolation)数值。
【画面文字:如果Lanczos-3引起星点黑环,那么选择Bicubic Spline,并且把Clamping threshold改成0.1】。如果是马赛克,对齐模型(Registration model)请选2-D Surface Splines 。这个系列后期我们还会详细介绍马赛克。
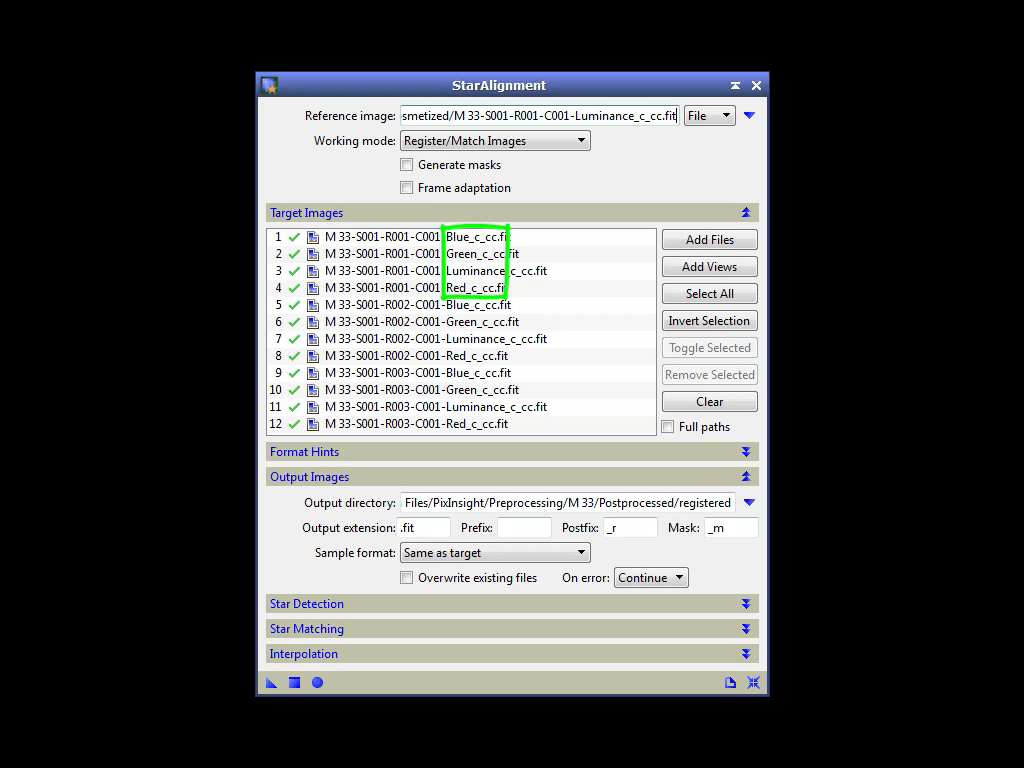
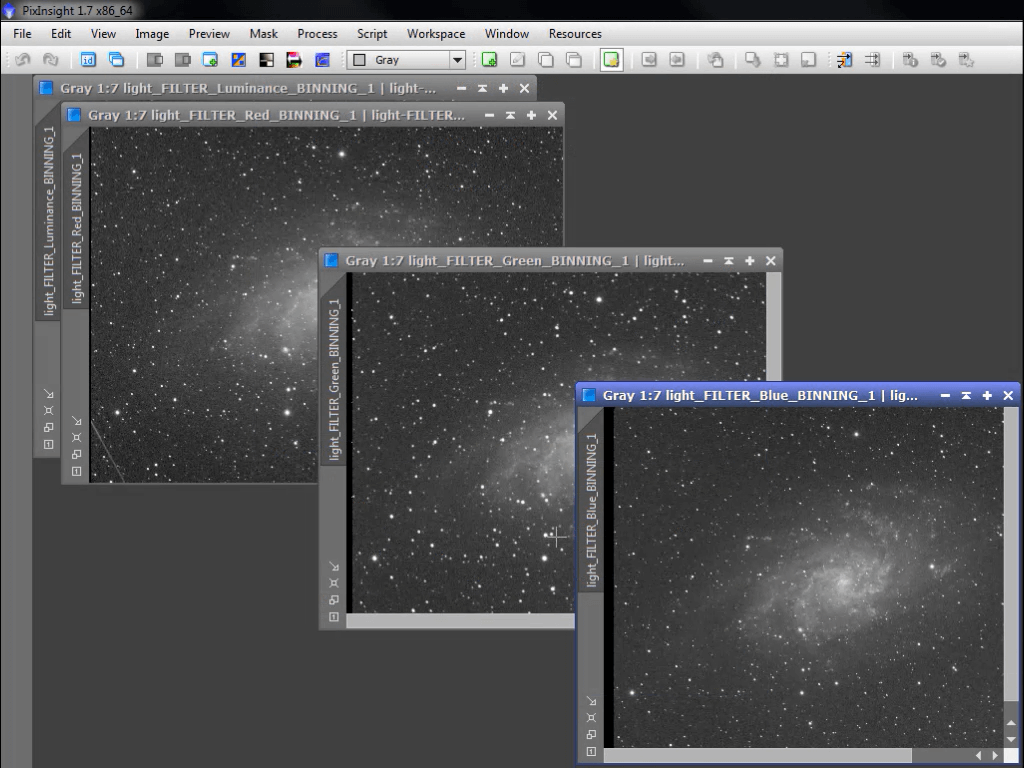
如果是黑白相机使用了不同的滤镜,步骤也是一样的。为了让结果更干净一些,我们推荐一次性对齐所有文件。虽然校准平场时不同滤镜需要分别进行,但是对齐不需要分滤镜,所有的图像可以对齐到同一个基准图像上。如果你的R,G,B图像是用bin2的方式拍的,选择一个没有bin的L图像作为基准图像(reference image),PI会自动upsample(上采样,放大图像)颜色通道的图像以L对齐。
打开这个链接,了解更多信息。

我们现在回到Image Integration把所有的东西集合到一起。本章第六节中展示了如何叠加校准并对齐彩色图像。黑白图像的叠加方法也是一模一样的,除了现在要按滤镜通道分别叠加。
不论你是否使用Batch Preprocessing, 或者 Batch Preprocessing 结合 Image Integration, 还是自己一步一步完全手动操作,总之你现在得到了高质量主亮场文件。
无论是彩色相机的RGB主亮场,还是独立的L, R, G 和 B, (Ha, OIII, SII) 单色主亮场,小心地用32位Floating Point FITS格式把他们保存起来。