

微信扫码即刻访问“巡星客”——国内领先的天文社区
说明:原著本段是采用收费的PinPoint为解析工具,因为在国内估计不太会有人如此破费,所以改为了SGP最新版本推荐使用的PlateSolve2。
PlateSolve2解析速度较快,但对于偏差稍大(1度左右)的照片解析效果不佳,和Pinpoint类似,故建议大家可以先使用TheSkyX或AT盲解减小误差后再回到SGP来。
大家选择SGP最看重的就是它可以自动对准目标、校准、自动中天翻转,还可以傻瓜式地制定马赛克计划并执行,所有上述功能都依赖于解析。所谓解析,就是用程序对照片进行分析,找到照片上的星点,基于其收录的星图数据库分析这些星点在天空中的精确位置。当完成解析后,解析程序就会知道拍摄时望远镜指向了星空的哪个位置,以及相机的角度和分辨率 (即每个像素的角秒值,一般称为Scale,单位是arcsec/pixel或 ”/px)。
在今晚——第四晚,具体讲述安装、配置与使用。
架好你的望远镜,并让它准备好拍摄,包括上电、对准极轴、平衡等。
启动SGP,打开Tools菜单,选中Equipment Profile Manager。
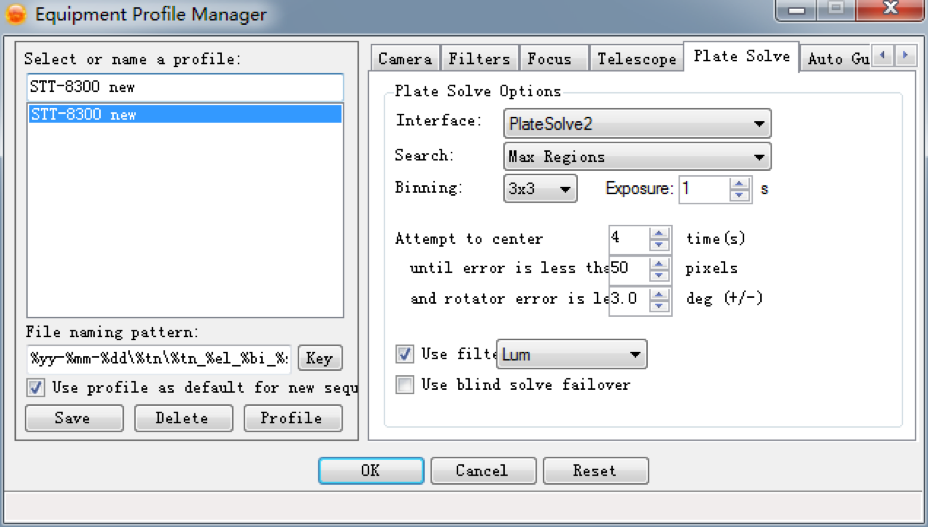
选择之前保存的profile,然后进入Plate Solve选项卡,并在Interface里选择PlateSolve2。为了解析更好,设置Attempt to center为4次,直到误差小于(until error is less than)50个像素并且旋转误差小于(and rotator error is less than)正负3度。选择滤镜用(Use filter)Lum,并不要选择如果失败用盲解“Use blind solve failover”,其余默认选项不动,然后点击Save。
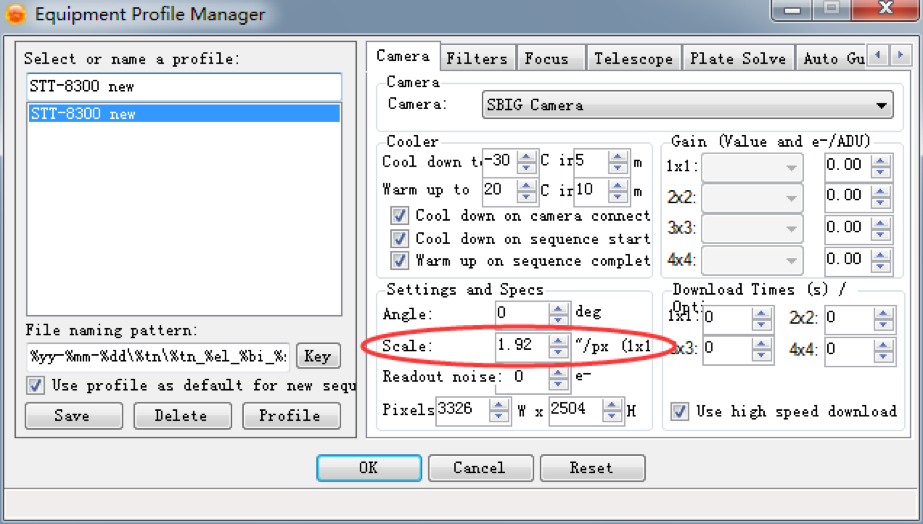
先别关闭上述窗口,让我们确认下解析程序可以知道正确的相机分辨率,需要检查下Camera选项卡里的Scale设置。如果你不知道这个值该如何计算,可以访问这个网站:http://starizona.com/acb/ccd/calc_pixel.aspx,然后保存。
接着,我们需要设置PlateSolve2。
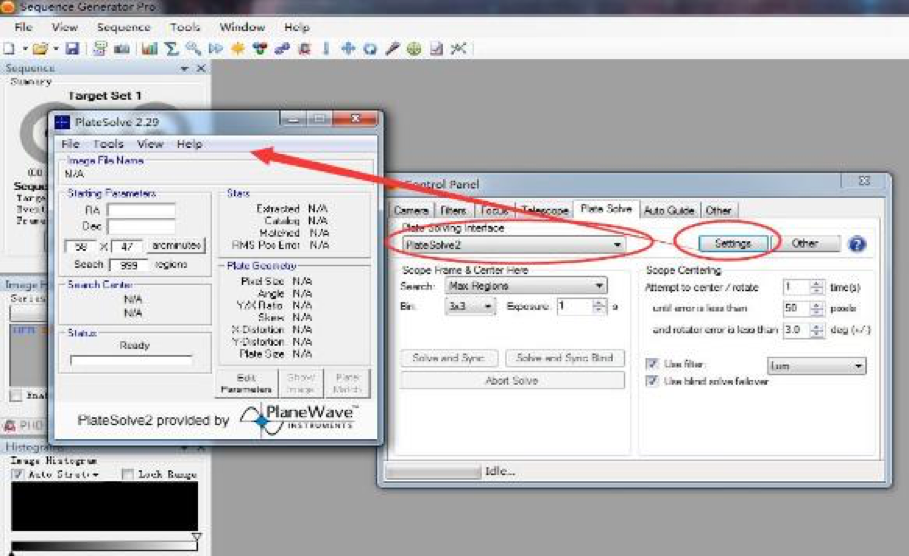
启动SGP的Control Panel(那个相机图标),进入Plate Solve选项卡,确认已经是PlateSolve2,并进行配置:
选择PlateSolve2界面上File菜单里的Configure Catalog Directories…
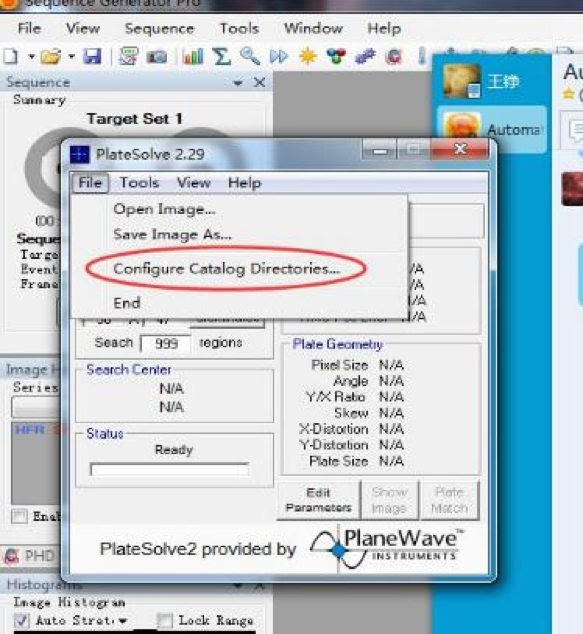
把目录设置为APM和UCAC3的安装目录。
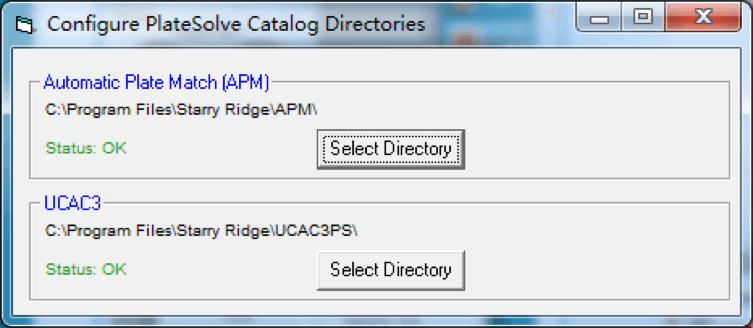
看到绿色的“Status:OK”就搞定了。
稳妥起见,为了验证解析工具,先用本地的Fit文件测试下解析功能是否正常。
建议选择之前解析同步后拍摄的文件,偏差太远PlateSolve2会无法解析。
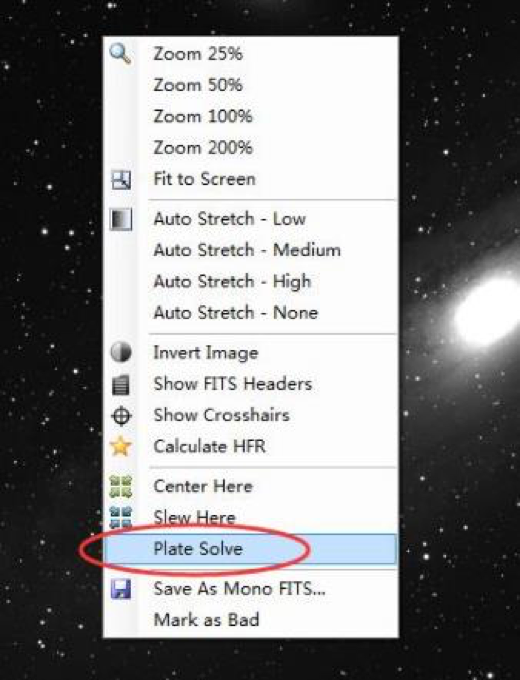
用SGP打开本地Fit文件,在照片上右键点击,选择Plate Solve(解析):
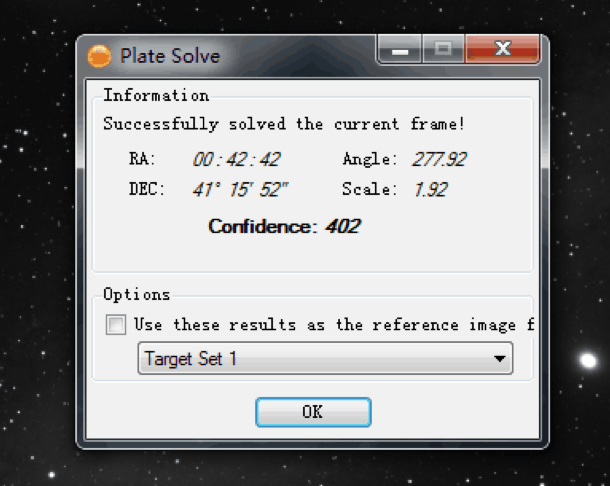
如果是SGP拍摄的照片,经纬度和分辨率都能自动读出。如果是MDL拍摄的照片,SGP升级到2.4.3.x以上就自动出现经纬度(2.4.2.x以下就读不出),但分辨率(Scale)没读出来,需要手动填写,如下图中的1.92:
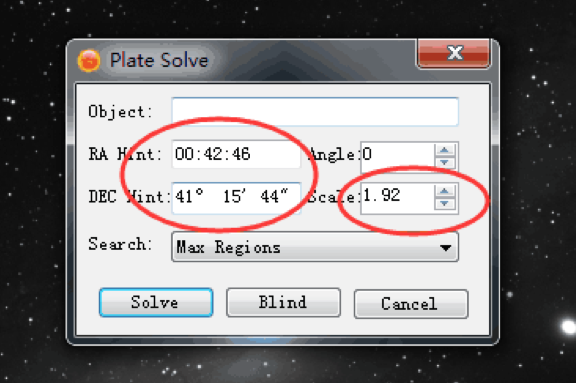
点击Solve后,SGP自动调用PlateSolve:
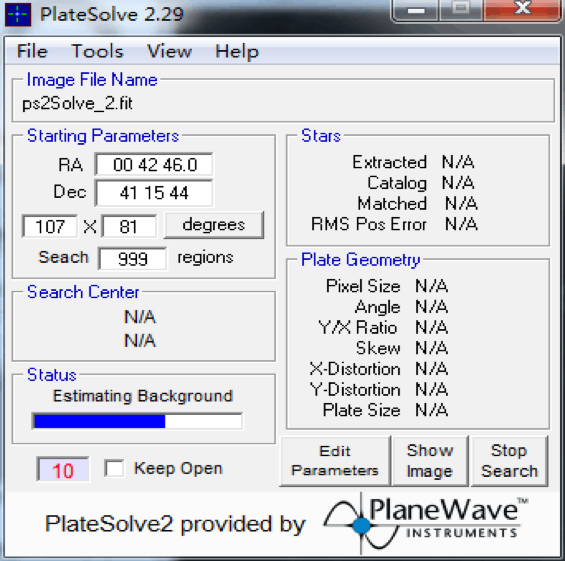
出现绿色提示就好了:

SGP中也出现相应提示,说明解析成功:
如果解析失败,可能存在几种原因:
- 偏差太大。最好先一星校准。
- 分辨率设置错误。检查下Camera选项卡里的设置。
- APM和UCAC3的安装目录设置错误。检查下PlateSolve2里的设置。
我们必须要让解析成功,否则SGP无法使用。
好~!咱们可以开始实际拍摄和解析操练了。请看第五夜:第一个拍摄任务序列。