抖动
翻译:雅痞张 Phillip
概述#
抖动是现代图像采集过程中的一个重要环节。CMOS和CCD传感器会受到各种电子噪声的影响,如固定模式噪声(FPN)和冷像素等缺陷。来自天体的光子落在传感器上,如果光子落在冷像素或热噪上,光子就会失效(译者注:无法正确的转换成电子)。抖动(Dithering)的动作是在连续曝光之间的,控制望远镜轻微移动,让光子落在传感器上的位置发生轻微的变化。这意味着,在之前的曝光中在死像素或热像素上的光子,下次曝光可以捕获正确的光(即数据),图像对齐问题在大多数后期叠软中都很容易处理。
不同位置的单张亮场的图像可以在对齐叠加的过程中,将排异算法(如sigma clip排异算法)变的更为有效,以剔除固定模式噪声和冷、热像素。这是因为热像素和冷像素在相机传感器中始终处于同一位置,抖动会使它们在移动之后出现在每个帧的不同位置。
(译者注:简单来说,抖动就是每拍摄一张图片轻微错开一些,后期将星点对齐叠加,就可以有效的将死像素或者热噪错开,再通过排异算法剔除掉这些不好的像素,可以很有效的提高图片质量,同时避免斜纹状的噪点,即FPN)
因为抖动的操作必须与导星镜协调(请记住,赤道仪已经有意移动了几个像素,导星相机会尝试反向移动抵消这个移动),抖动的操作由PHD2来管理。这个程序很简单。N.I.N.A暂停拍摄并命令PHD2执行抖动操作。PHD2执行抖动操作,抖动完成后反馈给N.I.N.A。任何需要的修正导星的操作都由PHD2自动处理,N.I.N.A随后恢复正常曝光。通常,抖动操作需要几十秒(最多)才能完成。
使用N.I.N.A的抖动功能#
N.I.N.A提供了三种不同的方式来执行抖动:
- 普通抖动,通过PHD2抖动
- 同步抖动,与架设在同一个赤道仪上的相机同步,同样通过PHD2抖动
- 内置抖动,使用N.I.N.A的直接导星功能实现抖动
要使用不同的方法实现抖动,在 设备> 导星 标签中选择.
普通PHD2抖动#
这是大多数用户的典型应用情景。用户有一个主相机,一个导星相机,并使用PHD2进行导星。按照序列中配置的间隔,N.I.N.A.将暂停主相机的操作,并向PHD2发送信号,以开始抖动操作。抖动操作完成后恢复拍摄。
使用PHD2同步抖动#
除了单相机外,多个望远镜多相机并联拍摄已经成为一种常见的配置。N.I.N.A可以通过多个应用程序实例(译者注:多开N.I.N.A程序)来控制这类型的装置。一个实例控制赤道仪、导星和主相机中的一个。多开的N.I.N.A.控制每个主相机,并将其操作传达给N.I.N.A.的主实例。当N.I.N.A.的多个实例启动时,此协调机制在后台自动设置。这个控制方式对抖动的操作造成了问题,因为如果没有N.I.N.A.的多个实例之间的协调,抖动操作可能会在其他主相机仍在曝光时启动(译者注:因为导星的抖动需要有一定稳定时间,当主相机A开始曝抖动并在稳定期间时,主相机B可能已经开始了下一张图片的曝光,这必然造成星点脱线)。
为了解决这个问题,抖动操作将与PHD2协调,让抖动不在任何一个相机的曝光过程中操作。N.I.N.A的开发人员Stanley Demont在描述同步抖动的视频里面,概述了N.I.N.A 1.8版本中的这个功能。
内置抖动#
有些情况下,没有使用导星设备,因此没有PHD2,但抖动仍然是可以实现的。这种配置的例子通常包括小型便携式设置,有一个主相机和望远镜或镜头,但没有导星。在这样的情况下,N.I.N.A.仍然可以实现抖动操作,但只能通过其直接的导星设备自行完成。一旦激活,抖动操作将在序列中可用,并直接受到N.I.N.A.的控制。
要求#
N.I.N.A.支持使用它与PHD2的直接通信来进行抖动操作,并让它作为设置中的一部分更易于设置。在一个序列中抖动有几个先决条件:
- 需要连接到一个赤道仪
- PHD2需要处于开启状态,正在导星,并可以和N.I.N.A通信(译者注,PHD2需要在软件中开启服务器模式才可以与外部拍摄软件通信,这个选项是默认开启的)
- PHD2相关设置参数,需要在被正确的输入
- 序列中需要启用抖动操作
PHD2设置#
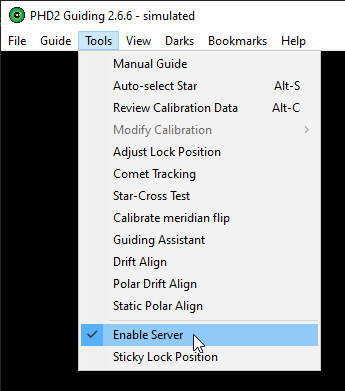
为了使N.I.N.A.与PHD2通信,并执行诸如抖动和导星等命令操作,必须启用PHD2的内部服务器。要启用PHD2的内部服务器,请转到PHD2的“工具”菜单并确保选中了“启用服务器模式”。
N.I.N.A 设置#
设置PHD2#
有关导星和抖动的设置可以在 选项 > 设备 选项卡中找到。默认设置适用于大多数情况。如果PHD2没有安装在默认位置,则需要指定 phd2.exe 的完整路径。这样操作,作为设备连接过程的一部分,N.I.N.A.可以自动启动PHD2。
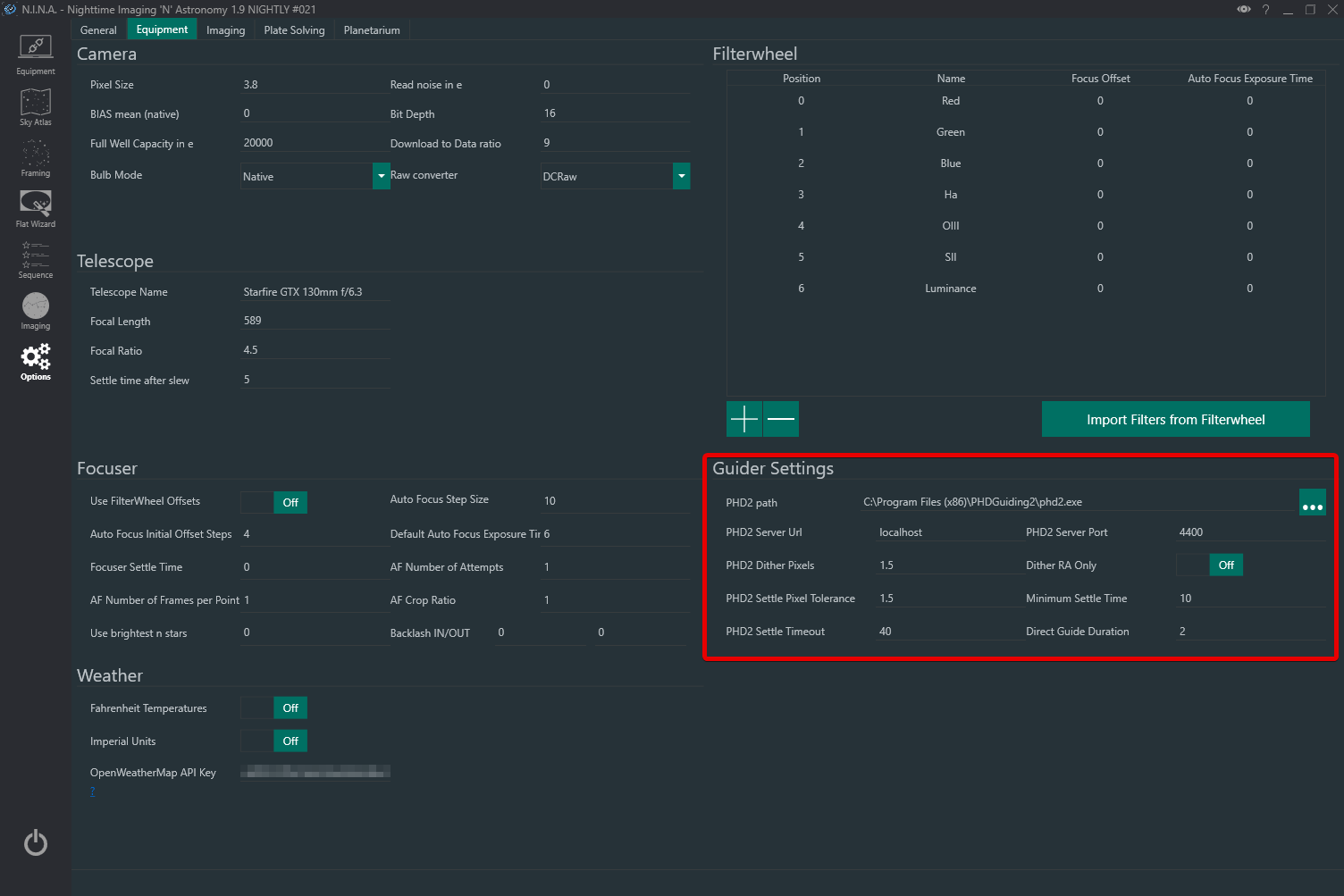
对两个最重要的抖动相关设置的解释如下:
- PHD2抖动像素:抖动动作将移动的像素数量(在导星相机上)。该值应考虑导星相机和主相机之间的成像比例,以角秒/像素为单位。要选择适当的值。你需要考虑由于抖动的移动,两次曝光之间会有多少成像相机像素移动。显然,其中一者的焦距和像素大小的2个像素覆盖区域,一定是与另一套系统不同的(译者注:主相机系统和导星系统之间的比例不同)。 通常建议导星相机抖动若干像素,使主相机位移约10像素。
让我们来做一个假设,假设有一个2.9微米像素的导星相机和一个240mm焦距的离轴导星镜,导星相机的解析率为2.9角秒/像素。主相机光学系统由一个3.8微米像素的相机和一个540mm焦距的主镜构成,成像解析率为1.5角秒/像素。导星相机移动6像素,对应的主相机的移动15角秒或10像素。因此,在这种情况下,PHD2中设置6像素抖动像素是合适的。
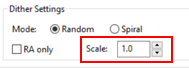
注意
实际上抖动的像素数值,将在PHD2中被乘以“缩放(Scale)”数值,可以在的高级设置>抖动 设置下找到的“缩放”值。该值将乘以N.I.N.A.中设置的抖动像素,以确定最终像素移位量。建议将其保留为1,并且只更改N.I.N.A中抖动像素的数量。
- 仅赤经轴抖动:这将导致抖动只发生在赤经轴上,并允许赤纬轴继续导星。
只有在下列情况下才应选中此选项
- 你的赤道仪不支持赤纬轴导星(即星野赤道仪) - 你的赤道仪回差非常高 - 你只使用赤纬进行导星
提示
可以使用联机工具计算导星相机/主相机的成像比例。通过输入导星系统的的焦距和相机像元大小,你将得到每个像素覆盖天空的角秒数(每像素角秒)。这样的工具有Astronomy Tools FOV Calculator(天文工具--视场计算器)。
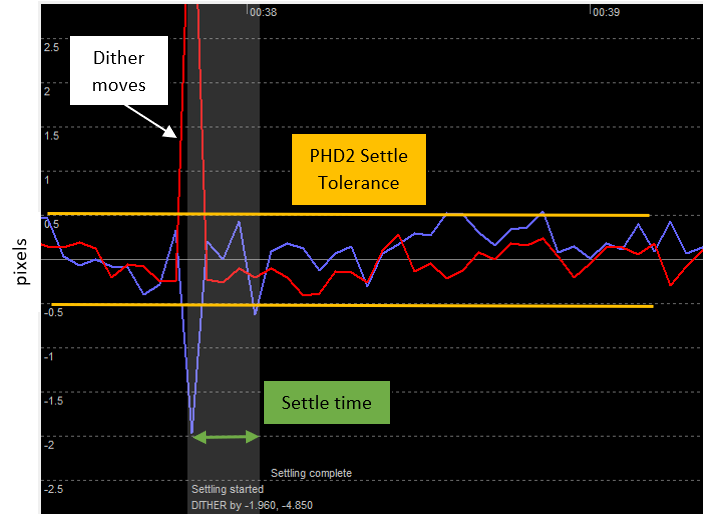
- 抖动稳定像素容差和稳定时间:这些是决定抖动是否成功的重要参数。当PHD2启动抖动时,赤道仪发出赤经赤纬随机移动,随机移动的最大值由PHD2抖动像素决定。然后,整套装置恢复其跟踪操作,但根据齿轮的机械稳定性不同,可能需要几秒钟才能恢复到正常的导星状态。此时长表示的是稳定时间,N.I.N.A.允许您定义一个最小稳定时长,在此期间不会尝试启动新的拍摄。
当导星经过抖动后,并停留在PHD2内设定的容差值之内时,抖动稳定操作才完全完成。稳定像素容差值(Settle Pixel Tolerance)以导星相机的像素来表示。
如果在PHD2稳定超时中设定的时间之后,仍然无法实现稳定,导星稳定会被认定失败,N.I.N.A重新开始曝光。
PHD2抖动像素 应该在参考PHD2导星记录,根据你的赤道仪导星性能和导星尺度决定。PHD2记录查看器(PHD2 log viewer) 是一个非常好的分析工具,点击此处下载。
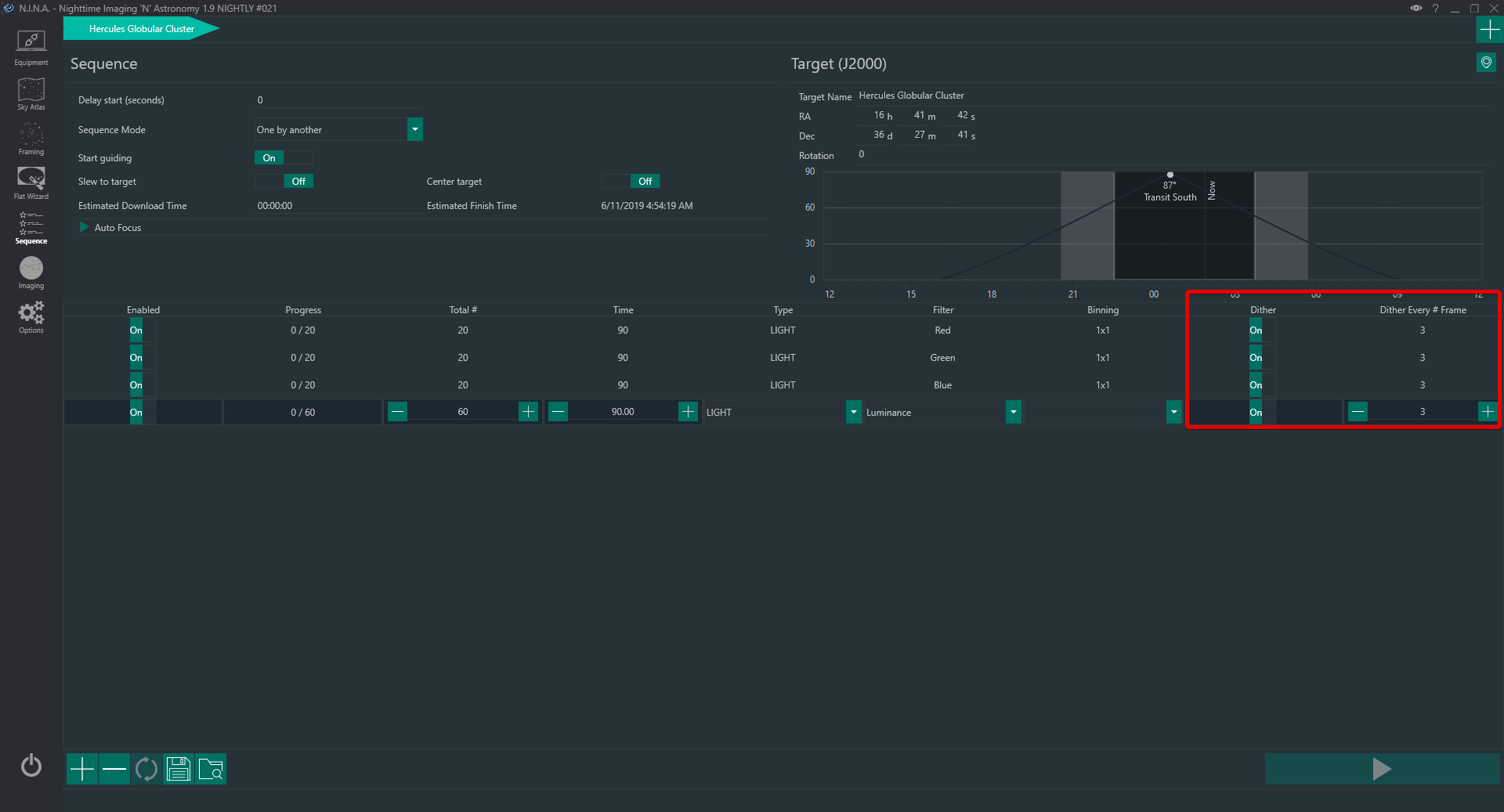
序列中的设置#
无论使用哪种抖动方法,在运行序列的过程中启动抖动都很简单。抖动操作可以针对序列中的以每一张和每N张的形式被激活,也就是说,序列中设置20张曝光,第二次曝光执行抖动,则将进行2次正常曝光,执行1次抖动,然后将进行下2次曝光,以此类推。N.I.N.A与PHD2一起管理这些操作,整个过程完全无需值守。
抖动的操作可在上一张图片正在下载的过程中进行。如果你的相机下载速度很慢,有可能在当你的相机完成下载并准备开始下一张拍摄时,抖动已经完成。(译者注:与CMOS相机不同,大部分CCD相机读出速度很慢,快则数秒慢则长达数十秒,在此过程中导星足以完成抖动和稳定工作。)
提示
如果你使用LRGB循环拍摄的序列 (参见: 高级序列设置) 你可以只在L帧做出抖动。如果使用一个彩色相机或单反,尽管你的单张曝光时间可能非常短(30秒、60秒),你可能希望减少抖动的次数以避免过分干扰导星,我们仍然建议每张拍摄后都进行抖动。