主控台
“主控台”选项卡是你的拍摄驾驶舱。
在这里,N.I.N.A.将显示有关拍摄图像的各种信息,并允许你控制拍摄图像的所有重要参数。
“主控台”选项卡在窗口中组织,可以动态排列以创建自己的布局。可以从顶部栏激活和停用可用窗口。要排列窗口,只需将其从窗口标题拖动并根据建议的占位符将其放置。
顶部工具条分成了两个主要的部分,信息和工具

信息#
这个窗口提供了有关拍摄图像和连接设备的重要状态信息
A. 主控台 
图像面板再位于主控台选项卡左侧,被用于显示最近拍摄的一张图像
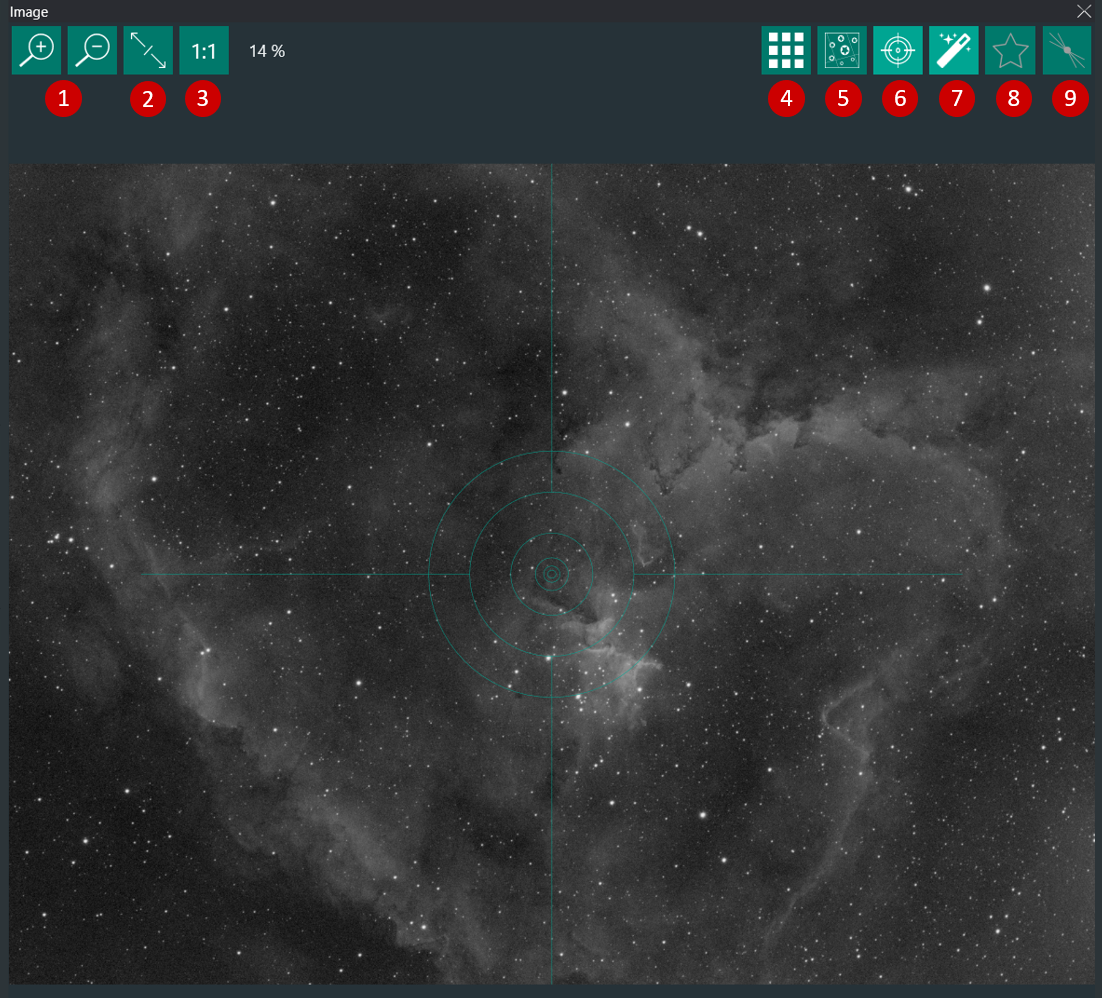
- 缩放 大/小
- 缩放到适合窗口
- 缩放到100%(1:1)
- 打开当前图像剪裁的边缘和中心图像,使用3x3九宫格布局,用于图像检查焦平面等问题造成的像差
- 启动当前图像的解析程序
- 打开或关闭十字线显示
- 打开或关闭自动显示图像(自动拉伸图像设置,请参考选项菜单)
- 打开或关闭自动侦测星点、检测HFR(星点半宽,半通量半径)。HFR用于自动对焦功能。当HFR检测打开时,每一张拍摄图像的HFR将被计算平均值之后,绘制在HFR历史窗口中(M)
选项-主控台中的“自动标注图像”选项如果被开启,计算得到的HFR数值将被显示在图像上

- 激活鱼骨板星点分析对焦工具,用于使用鱼骨板手动对焦。
B. 相机 
此面板显示主相机和传感器属性以及制冷状态
需要连接相机
- 相机状态详细信息
- 启动/停用制冷。如果在设备中设置了冷却/升温周期,这将用于执行温度变化程序。
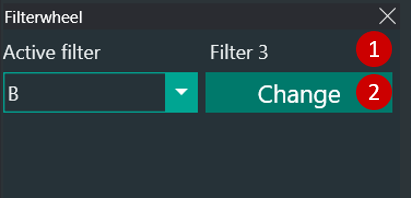
C. 滤镜轮 
连接过电动滤镜轮后,此面板显示当前滤镜(1),并允许您通过下拉菜单(2)选择滤镜来手动切换滤镜
D. 电动调焦器 
此面板显示电动调焦器状态,并允许您手动将其移动到所需位置
需要连接电动调焦器
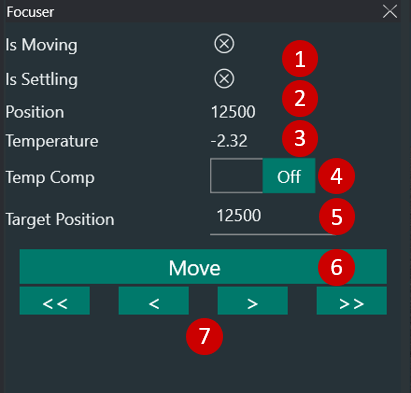
- 电动调焦器现在的状态(运动或停止)
- 电动调焦器现在的位置(电动调焦器电机的绝对步数位置)
- 电动调焦器温度(如果电动调焦器有环境温度传感器)
- 打开或关闭电动调焦器温度补偿
- 在这里,你可以通过单击“移动”来设置调焦器移动的目标位置(7)
- 移动电动调焦器到自定义(6)位置
你可以方便地将目标位置设定位接近焦点的位置。这个位置可以通过在明亮恒星上使用鱼骨板来确定(参见手动对焦目标)。接近合焦后,在目标位置框中输入“位置”(3)中指示的步数。然后,在开始自动对焦程序之前,您可以在每次拍摄开始时指示调焦器移动到该位置
- 箭头将使电动调焦器前后移动一定位置,在选项-设备下设置的自动对焦步长中设置:
- 单箭头< >:一半自动对焦步长
- 双箭头<< >>:五倍自动对焦步长
E. 电动旋转器 
这里你可以控制电动旋转器
需要连接ASCOM旋转器
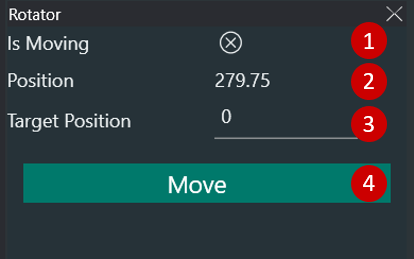
- 旋转器现在的状态
- 旋转器现在的位置
- 输入旋转器目标位置
- 移动旋转器到目标位置
F. 赤道仪 
赤道仪面板提供了有关赤道仪的所有重要信息,如跟踪状态、恒星实时时间、到中天的时间和当前望远镜的坐标。
需要连接至ASCOM赤道仪

G. 导星 
导星面板从PHD导星实时图像复制而来。
必须连接到PHD2,以便显示导星的趋势和修正(RA和DEC)。
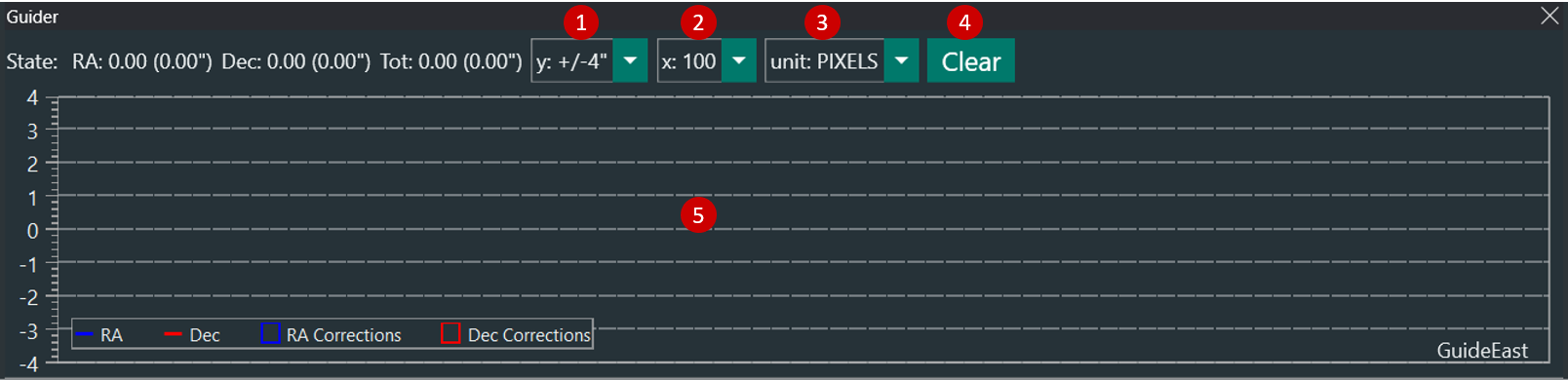
- 选择Y轴的尺度范围
- 选择X轴的尺度范围
- 选择Y轴的单位:
- 像素:导星相机的像素
- 角秒:单位为角秒(这是由PHD2根据导星相机像素大小和导星镜焦距计算的)
- 清除图表
- 图表范围,这是PHD2图表的可视化位置
H. 序列 
序列面板允许你启动/暂停/停止成像序列,并提供有关活动序列的信息。要了解如何设置序列,请参阅序列部分。
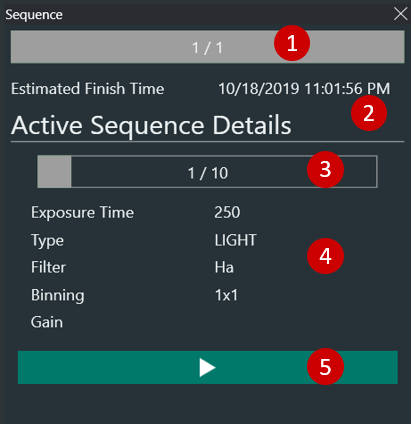
- 序列状态:显示已完成/剩余的序列
- 预计完成时间:活动序列的预计完成时间
- 激活序列的已完成/剩余曝光
- 激活序列的摄像机参数
- 启动:启动活动序列。当序列正在运行时,暂停(6)和取消(7)序列选项将可用
I. 开关 
这个面板将使你可以控制连接的开关
需要连接开关硬件

- 可用开关和状态
- 手动选择开关
- 打开或关闭某个开关
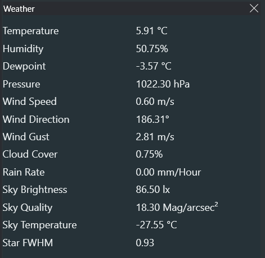
J. 天气 
来自OpenWeatherMap的天气和温度信息
选项-设备下必须设置OpenWeatherMap API密钥
K. 统计 
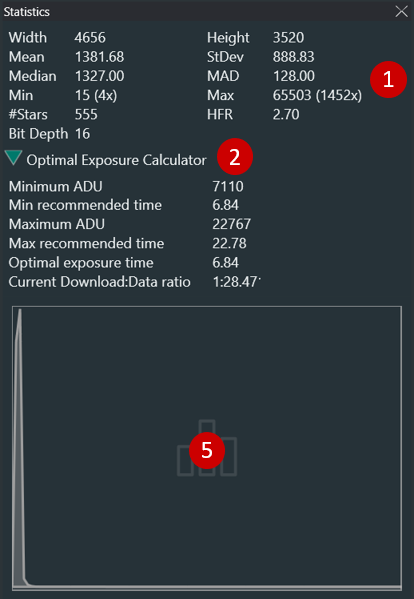
在此面板中,将报告有关最后一个捕获图像的所有重要信息
-
与最后一张拍摄图像相关的基础统计信息:
- 宽度和高度,以像素为单位
- ADU中的平均值、标准差、中值和MAD值
- 图像中ADU的最小和最大值
- 检测到的星点数量和平均HFR
恒星,HFR只有在自动检测激活时才会显示
- 图像文件头中反馈的位深(注:绝大多数相机,即使AD转换器是12bit或者14bit,图像依然会对齐到16bit,所以文件头依然是16bit的)
-
最佳曝光计算器:推荐使用此工具
基于最后拍摄图像,测量ADU的最小和最大值,给出建议的曝光时间。该工具考虑了平均天空辉光,计算曝光时间,让它足够淹没相机读出噪声的3倍(最小值)和10倍(最大值)。
最佳曝光时间将考虑下载速率。对于快速下载相机,这将基本上符合最小建议时间。
最小和最大曝光时间的计算如下:
最小推荐曝光时长 = ((MinExposureADU - 偏移量) / (均值 - 偏移量)) * 曝光时间
最大推荐曝光时长 = ((MaxExposureADU - 偏移量) / (均值 - 偏移量)) * 曝光时间
其中:
MinExposureADU = 偏移量 + 3 * _squaredReadNoise
MaxExposureADU = 偏移量 + 10 * _squaredReadNoise公式依赖于在选项-设备中设置的相机参数,并且仅对一个特定的增益级别有效。
如果更改相机的增益,则必须在设备中输入一组新的参数。 -
最后一张拍摄图像的直方图
M. HFR 历史 
当自动星点HFR(半通量半径)检测开启时,该面板将显示在每一张图像中,HFR值和被检测HFR星点数量的历史记录。
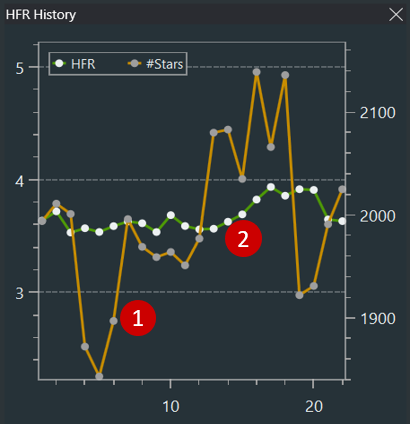
- 黄线:被检测HFR星点的数量
- 绿线:HFR的平均值
工具#
N. 主控台 
成像面板允许你在相机支持下进行单次曝光或实时预览
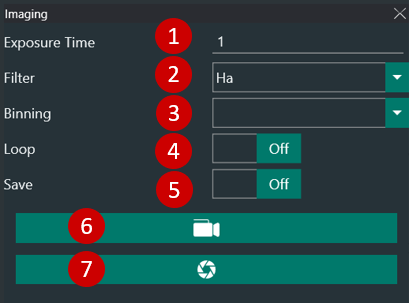
- 单张曝光时间(秒)
- 用于拍摄的滤镜(如果连接了滤镜轮)
- 相机合并像素
- 打开或关闭连续曝光这对于使用鱼骨板进行手动对焦特别有用
- 打开或关闭当前拍摄图像的高清保存
- 当相机支持时,这将激活实时显示模式
- 开始曝光
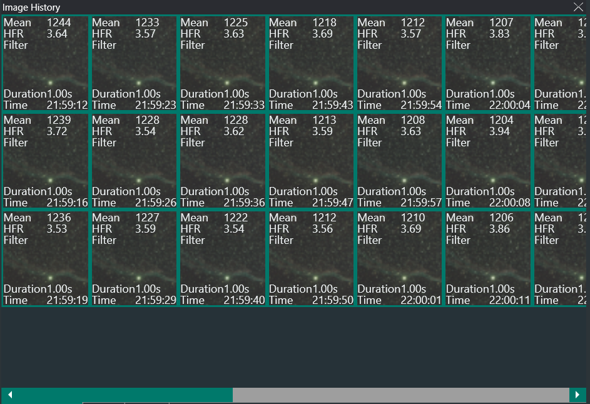
O. 图像历史 
图像历史记录面板显示当前序列拍摄图像的缩略图列表以及基本统计信息:ADU中的平均值、平均HFR、使用的滤镜、曝光时间和拍摄时间。
双击任一图标,相关图像将在图像面板(A)中打开
P. 解析 
解析版是拍摄过程中非常重要的一步,有关解析过程的更多信息,请参阅高级主题中的解析。此面板允许你执行手动解析操作,并保存所有解析过程的历史记录。
解析工作的先决条件是:
在“选项-解析”中定义了外部解析软件
在选项-设备中定义望远镜焦距
在选项-设备中定义相机像素大小(注:大部分天文相机连接后都可以自动识别,单反相机需要手动输入)
要进行解析的图像已使用指定的焦距和像素大小的拍摄系统拍摄

- 解析结果
- 打开或关闭与解析同步功能(建议在以下情况下使用)
- 打开或关闭将启动居中指令,如果解析得到的位置与预期位置不匹配,则将赤道仪重新指向到目标坐标
- 打开或关闭,赤道仪重新居中到目标,直到误差小于(5)
- (4)中定义值的误差阈值
- 解析需要拍摄图像,拍摄时使用的曝光时间
- 拍摄图像用来解析的时候,所使用的滤镜
- 拍摄解析图像时相机的合并像素
- 拍摄一张图片用来解析
- 解析历史记录
Q. 极轴校准 
“极轴校准”面板提供了两种方法来确定极轴对齐的偏离程度和调整方法。一种是解析得到极坐标并对准,另一种是DARV回转。
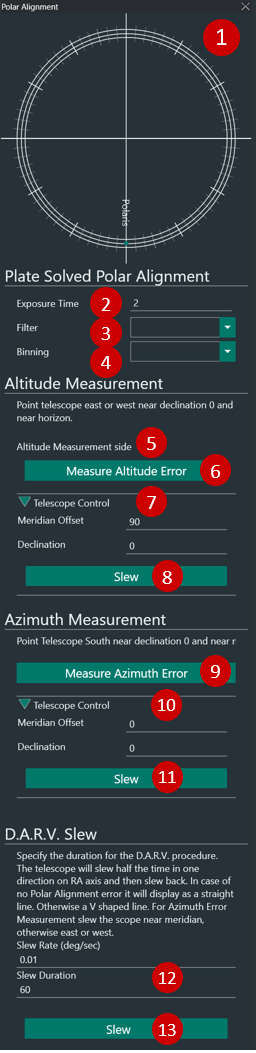
- 极轴镜:显示北极星的位置时,通过赤道仪的极轴镜
将不适用于南半球。使用设置中的纬度和经度。
- 定义了应用于拍摄解析极坐标校准测量的曝光时间(使用主相机曝光)
- 拍摄校准图像使用的滤镜
- 相机合并像素
- 望远镜所指高度的测量位置。赤道仪可以指向东侧和西侧。
- 测量仰角误差:将启动当前位置的解析,然后沿RA轴旋转半度,取另一个解析的结果,并将两者的结果进行比较以测量误差量
望远镜应指向赤纬0度,赤道仪东侧或者西侧。
- 望远镜的DEC和子午线偏移
此处输入的值将保存为下次使用的设置
- 将赤道仪指向到指定的DEC和子午线偏移
- 将启动当前位置的解析,然后沿RA轴旋转半度,取另一图像解析,并比较两者的结果,以测量误差量
望远镜应指向南面,靠近子午线0位
- 与步骤(7)相同,除了方位角
以外,此处输入的值将保存为下次使用的设置
- 同步骤(8)
- DARV指向范围应移动的持续时间和速率
- 通过在一个RA方向旋转指定持续时间的一半,然后在曝光时返回,从而启动DARV指向。
R. 自动对焦 
此面板允许你根据选项-设备中设置的自动对焦参数手动触发自动对焦程序。

- 自动对焦曲线
- 最后一次自动对焦运行的数据
- 开始自动对焦程序
- 开始回差测量
S. 手动对焦目标 
当你需要手动对焦时,这个标签可以让你根据你的位置和时间在当前可见的更亮的恒星中进行选择。
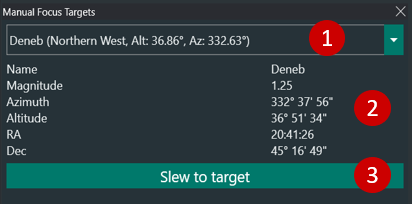
- 选择恒星的列表
- 选择恒星的数据参考
- 指向到选中的恒星